[ Optimization repository ] [ GCC ] [ LLVM ] [ MILEPOST optimization predictor ]
[ Andrew Ng's ML course ] [ Google ML crash course ] [ Facebook Field Guide to ML ]
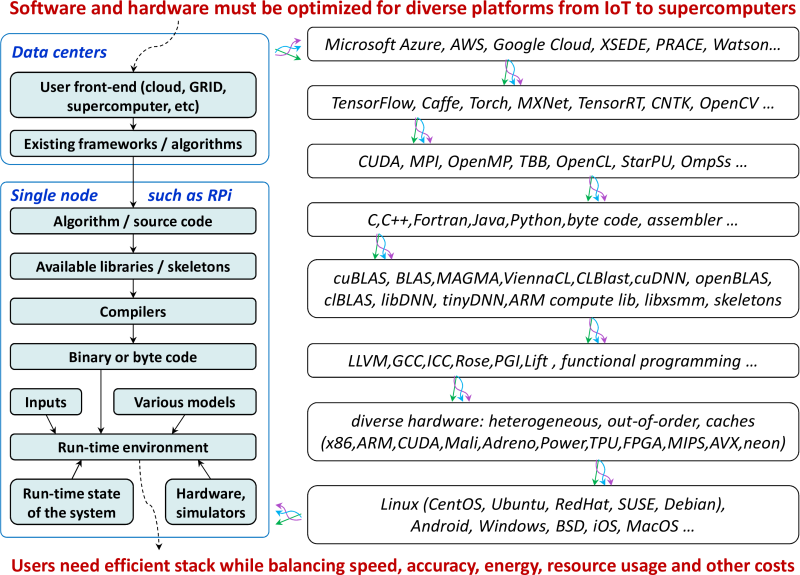
Developing efficient software and hardware has never been harder whether it is for a tiny IoT device or an Exascale supercomputer. Apart from the ever growing design and optimization complexity, there exist even more fundamental problems such as lack of interdisciplinary knowledge required for effective software/hardware co-design, and a growing technology transfer gap between academia and industry.
We introduce our new educational initiative to tackle these problems by developing Collective Knowledge (CK), a unified experimental framework for computer systems research and development. We use CK to teach the community how to make their research artifacts and experimental workflows portable, reproducible, customizable and reusable while enabling sustainable R&D and facilitating technology transfer. We also demonstrate how to redesign multi-objective autotuning and machine learning as a portable and extensible CK workflow. Such workflows enable researchers to experiment with different applications, data sets and tools; crowdsource experimentation across diverse platforms; share experimental results, models, visualizations; gradually expose more design and optimization choices using a simple JSON API; and ultimately build upon each other's findings.
As the first practical step, we have implemented customizable compiler autotuning, crowdsourced optimization of diverse workloads across Raspberry Pi 3 devices, reduced the execution time and code size by up to 40%, and applied machine learning to predict optimizations. We hope such approach will help teach students how to build upon each others' work to enable efficient and self-optimizing software/hardware/model stack for emerging workloads.
1 Introduction
Many recent international roadmaps for computer systems research
appeal to reinvent computing [1, 2, 3].
Indeed, developing, benchmarking, optimizing and co-designing hardware and software
has never been harder, no matter if it is for embedded and IoT devices,
or data centers and Exascale supercomputers.
This is caused by both physical limitations of existing technologies
and an unmanageable complexity of continuously changing computer systems
which already have too many design and optimization choices and objectives
to consider at all software and hardware levels [4],
as conceptually shown in Figure 1.
That is why most of these roadmaps now agree with our vision
that such problems should be solved in a close collaboration
between industry, academia and end-users [5, 6].
However, after we initiated artifact evaluation (AE) [7, 8] at several premier ACM and IEEE conferences to reproduce and validate experimental results from published papers, we noticed an even more fundamental problem: a growing technology transfer gap between academic research and industrial development. After evaluating more than 100 artifacts from the leading computer systems conferences in the past 4 years, we noticed that only a small fraction of research artifacts could be easily customized, ported to other environments and hardware, reused, and built upon. We have grown to believe that is this due to a lack of a common workflow framework that could simplify implementation and sharing of artifacts and workflows as portable, customizable and reusable components with some common API and meta information vital for open science [9].
At the same time, companies are always under pressure and rarely have time to dig into numerous academic artifacts shared as CSV/Excel files and ``black box'' VM and Docker images, or adapt numerous ad-hoc scripts to realistic and ever changing workloads, software and hardware. That is why promising techniques may remain in academia for decades while just being incrementally improved, put on the shelf when leading students graduate, and ``reinvented'' from time to time.
Autotuning is one such example: this very popular technique has been actively researched since the 1990s to automatically explore large optimization spaces and improve efficiency of computer systems [10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 26, 27, 28, 29, 30, 31, 32, 33]. Every year, dozens of autotuning papers get published to optimize some components of computer systems, improve and speed up exploration and co-design strategies, and enable run-time adaptation. Yet, when trying to make autotuning practical (in particular, by applying machine learning) we faced numerous challenges with integrating such published techniques into real, complex and continuously evolving software and hardware stack [5, 4, 6, 9].
Eventually, these problems motivated us to develop a common experimental framework and methodology similar to physics and other natural sciences to collaboratively improve autotuning and other techniques. As part of this educational initiative, we implemented an extensible, portable and technology-agnostic workflow for autotuning using the open-source Collective Knowledge framework (CK) [34, 35]. Such workflows help researchers to reuse already shared applications, kernels, data sets and tools, or add their own ones using a common JSON API and meta-description [36]. Moreover, such workflows can automatically adapt compilation and execution to a given environment on a given device using integrated cross-platform package manager.
Our approach takes advantage of a powerful and holistic top-down methodology successfully used in physics and other sciences when learning complex systems. The key idea is to let novice researchers first master simple compiler flag autotuning scenarios while learning interdisciplinary techniques including machine learning and statistical analysis. Researchers can then gradually increase complexity to enable automatic and collaborative co-design of the whole SW/HW stack by exposing more design and optimization choices, multiple optimization objectives (execution time, code size, power consumption, memory usage, platform cost, accuracy, etc.), crowdsource autotuning across diverse devices provided by volunteers similar to SETI@home [37], continuously exchange and discuss optimization results, and eventually build upon each other's results.
We use our approach to optimize diverse kernels and real workloads such as
zlib in terms of speed and code size by crowdsourcing compiler flag autotuning
across Raspberry Pi3 devices using the default GCC 4.9.2 and the latest GCC
7.1.0 compilers.
We have been able to achieve up to 50% reductions in code size and from 15%
to 8 times speed ups across different workloads over the ``-O3'' baseline.
Our CK workflow and all related artifacts are available at GitHub
to allow researchers to compare and improve various exploration strategies
(particularly based on machine learning algorithms such as KNN, GA, SVM,
deep learning, though further documentation of APIs is still
required) [24, 6].
We have also shared all experimental results in our open repository of
optimization knowledge [38, 39] to be
validated and reproduced by the community.
We hope that our approach will serve as a practical foundation for open, reproducible and sustainable computer systems research by connecting students, scientists, end-users, hardware designers and software developers to learn together how to co-design the next generation of efficient and self-optimizing computer systems, particularly via reproducible competitions such as ReQuEST [40].
This technical report is organized as follows. Section 2 introduces the Collective Knowledge framework (CK) and the concept of sharing artifacts as portable, customizable and reusable components. Section 3 describes how to implement a customizable, multi-dimensional and multi-objective autotuning as a CK workflow. Section 4 shows how to optimize compiler flags using our universal CK autotuner. Section 5 presents a snapshot of the latest optimization results from collaborative tuning of GCC flags for numerous shared workloads across Raspberry Pi3 devices. Section 6 shows optimization results of zlib and other realistic workloads for GCC 4.9.2 and GCC 7.1.0 across Raspberry Pi3 devices. Section 7 describes how implement and crowdsource fuzzing of compilers and systems for various bugs using our customizable CK autotuning workflow. Section 8 shows how to predict optimizations via CK for previously unseen programs using machine learning. Section 9 demonstrates how to select and autotune models and features to improve optimization predictions while reducing complexity. Section 10 shows how to enable efficient, input-aware and adaptive libraries and programs via CK. Section 11 presents CK as an open platform to support reproducible and Pareto-efficient co-design competitions of the whole software/hardware/model stack for emerging workloads such as deep learning and quantum computing. We present future work in Section 12. We also included Artifact Appendix to allow students try our framework, participate in collaborative autotuning, gradually document APIs and improve experimental workflows.
2 Converting ad-hoc artifacts to portable and reusable components with JSON API
Artifact sharing and reproducible experimentation are key
for our collaborative approach to machine-learning based optimization
and co-design of computer systems, which was first prototyped
during the EU-funded MILEPOST project [5, 41, 24].
Indeed, it is difficult, if not impossible, and time consuming to build useful predictive models
without large and diverse training sets (programs, data sets),
and without crowdsourcing design and optimization space exploration
across diverse hardware [9, 6].
While we have been actively promoting artifact sharing for the past 10 years since the MILEPOST project [5, 42], it is still relatively rare in the community systems community. We have begun to understand possible reasons for that through our Artifact Evaluation initiative [7, 8] at PPoPP, CGO, PACT, SuperComputing and other leading ACM and IEEE conferences which has attracted over a hundred of artifacts in the past few years.
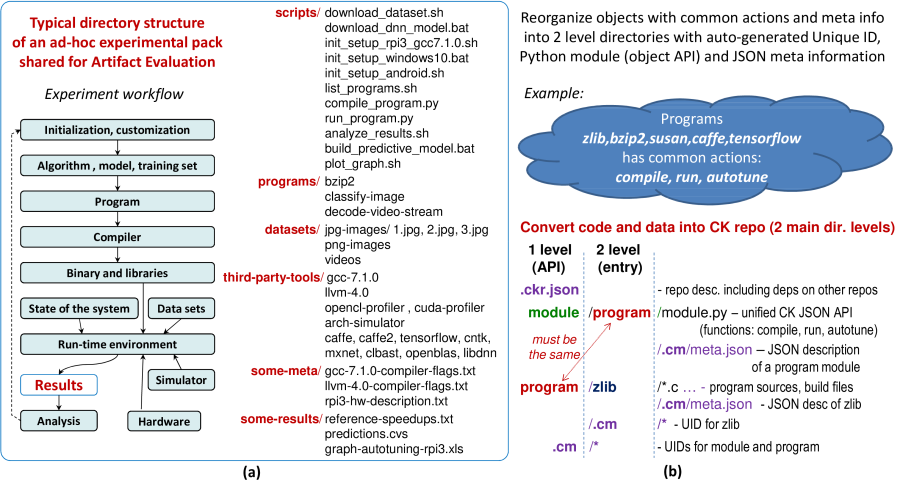
Unfortunately, nearly all the artifacts have been shared simply as zip archives, GitHub/GitLab/Bitbucket repositories, or VM/Docker images, with many ad-hoc scripts to prepare, run and visualize experiments, as shown in Figure 2a. While a good step towards reproducibility, such ad-hoc artifacts are hard to reuse and customize as they do not provide a common API and meta information.
Some popular and useful services such as Zenodo [43] and FigShare [44] allow researchers to upload individual artifacts to specific websites while assigning DOI [45] and providing some meta information. This helps the community to discover the artifacts, but does not necessarily make them easy to reuse.
After an ACM workshop on reproducible research methodologies (TRUST'14) [46] and a Dagstuhl Perspective workshop on Artifact Evaluation [8], we concluded that compute systems research lacked a common experimental framework in contrast with other sciences [47].
Together with our fellow researchers, we also assembled the following wish-list for such a framework:
●
●
●
●
●
●
●
Since there was no available open-source framework with all these features, we decided to develop such a framework, Collective Knowledge (CK) [34, 35], from scratch with initial support from the EU-funded TETRACOM project [50]. CK is implemented as a small and portable Python module with a command line front-end to assist users in converting their local objects (code and data) into searchable, reusable and shareable directory entries with user-friendly aliases and auto-generated Unique ID, JSON API and JSON meta information [36], as described in [35, 51] and conceptually shown in Figure 2b.
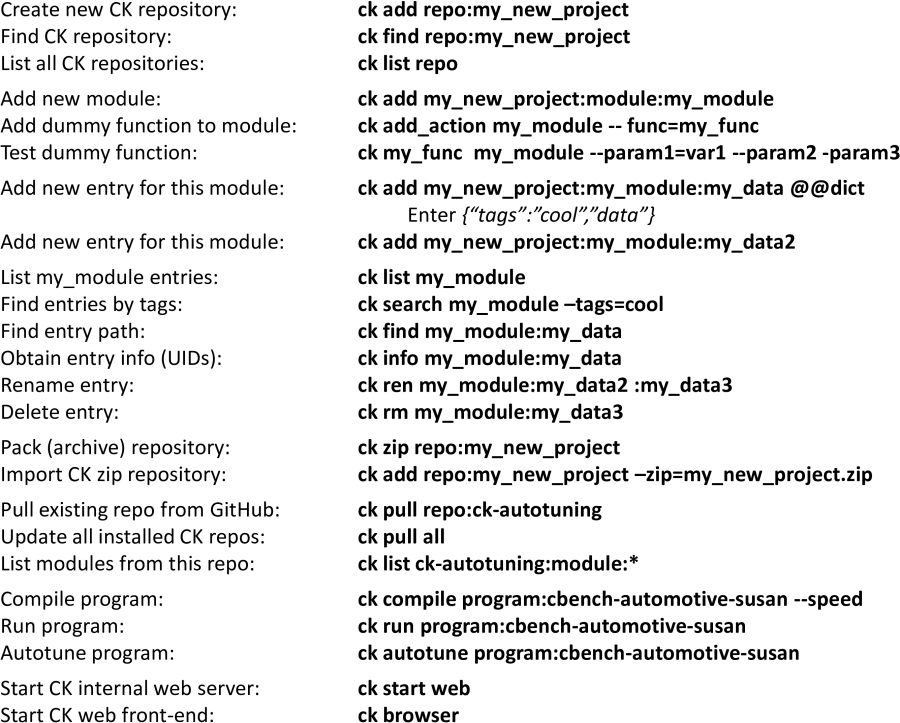
The user first creates a new local CK repository as follows:
$ ck add repo:new-ck-repo
Initially, it is just an empty directory:
$ ck find repo:new-ck-repo
$ ls `ck find repo:new-ck-repo`
Now, the user starts adding research artifacts as CK components with extensible APIs. For example, after noticing that we always perform 3 common actions on all our benchmarks during our experiments, "compile", "run" and "autotune", we want to provide a common API for these actions and benchmarks, rather than writing ad-hoc scripts. The user can provide such an API with actions by adding a new CK module to a CK repository as follows:
$ ck add new-ck-repo:module:programCK will then create two levels of directories module and program in the new-ck-repo and will add a dummy module.py where common object actions can be implemented later. CK will also create a sub-directory .cm (collective meta) with an automatically generated Unique ID of this module and various pre-defined descriptions in JSON format (date and time of module creation, author, license, etc) to document provenance of the CK artifacts.
Users can now create holders (directories) for such objects sharing common CK module and an API as follows:
$ ck add new-ck-repo:program:new-benchmarkCK will again create two levels of directories: the first one specifying used CK module (program) and the second one with alias new-benchmark to keep objects. CK will also create three files in an internal .cm directory:
●
●
●
Users can then find a path to a newly created object holder (CK entry) using the ck find program:new-benchmark command and then copy all files and sub-directories related to the given object using standard OS shell commands.
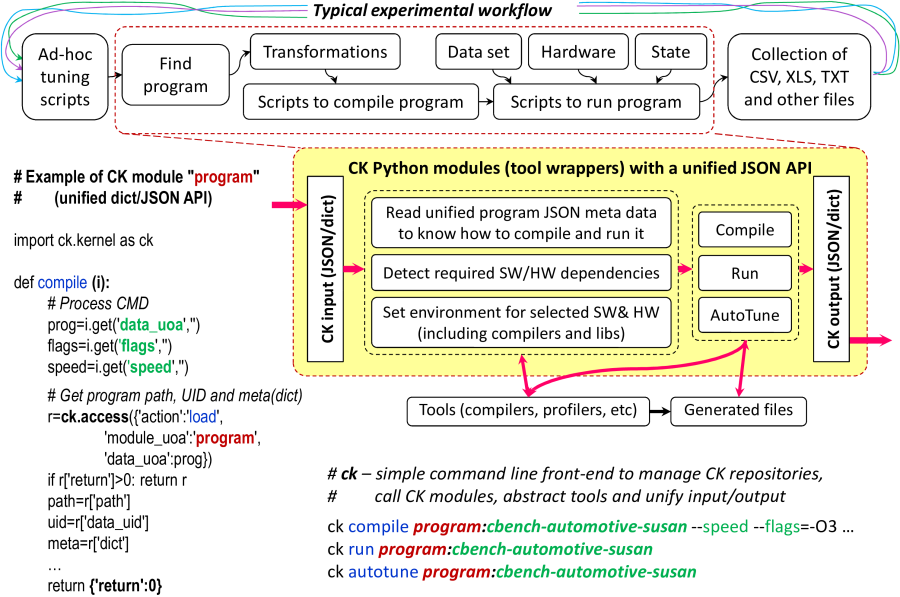
This allows to get rid of ad-hoc scripts by implementing actions inside reusable CK Python modules as shown in Figure 3. For example, the user can add an action to a given module such as compile program as follows:
$ ck add_action module:program --func=compileCK will create a dummy function body with an input dictionary i inside module.py in the CK module:program entry. Whenever this function is invoked via CK using the following format:
$ ck compile program:some_entry --param1=val1the command line will be converted to i dictionary and printed to the console to help novice users understand the CK API. The user can now substitute this dummy function with a specific action on a specific entry (some program in our example based on its meta information) as conceptually shown in Figure 3. The above example shows how to call CK functions from Python modules rather than from the command line using the ck.access function. It also demonstrates how to find a path to a given program entry, load its meta information and unique ID. For the reader's convenience, Figure 4 lists several important CK commands.
This functionality should be enough to start implementing unified compilation and execution of shared programs. For example, the program module can read instructions about how to compile and run a given program from the JSON meta data of related entries, prepare and execute portable sub-scripts, collect various statistics, and embed them to the output dictionary in a unified way. This can be also gradually extended to include extra tools into compilation and execution workflow such as code instrumentation and profiling.
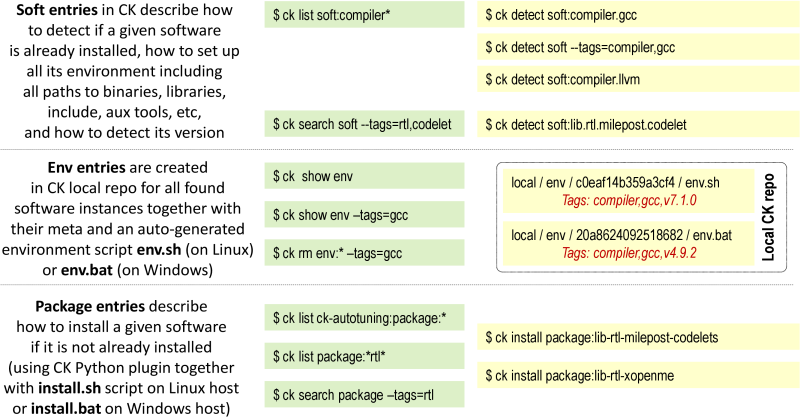
Here we immediately face another problem common for computer systems research: how to support multiple versions of various and continuously evolving tools and libraries? However, since we no longer hardwire calls to specific tools directly in scripts but invoke them from higher-level CK modules, we can detect all required tools and set up their environment before execution. To support this concept even better, we have developed a cross-platform package manager as a ck-env repository [52] with several CK modules including soft, env, package, os and platform. These modules allow the community to describe various operating systems (Linux, Windows, MacOS, Android); detect platform features (ck detect platform); detect multiple-versions of already installed software (ck detect soft:compiler.gcc); prepare CK entries with their environments for a given OS and platform using env module (ck show env) thus allowing easy co-existence of multiple versions of a given tool; install missing software using package modules; describe software dependencies using simple tags in a program meta description (such as compiler,gcc or lib,caffe), and ask the user to select an appropriate version during program compilation when multiple software versions are registered in the CK as shown in Figure 5.
Such approach extends the concept of package managers including Spack [53] and EasyBuild [54] by integrating them directly with experimental CK workflows while using unified CK API, supporting any OS and platform, and allowing the community to gradually extend existing detection or installation procedures via CK Python scripts and CK meta data.
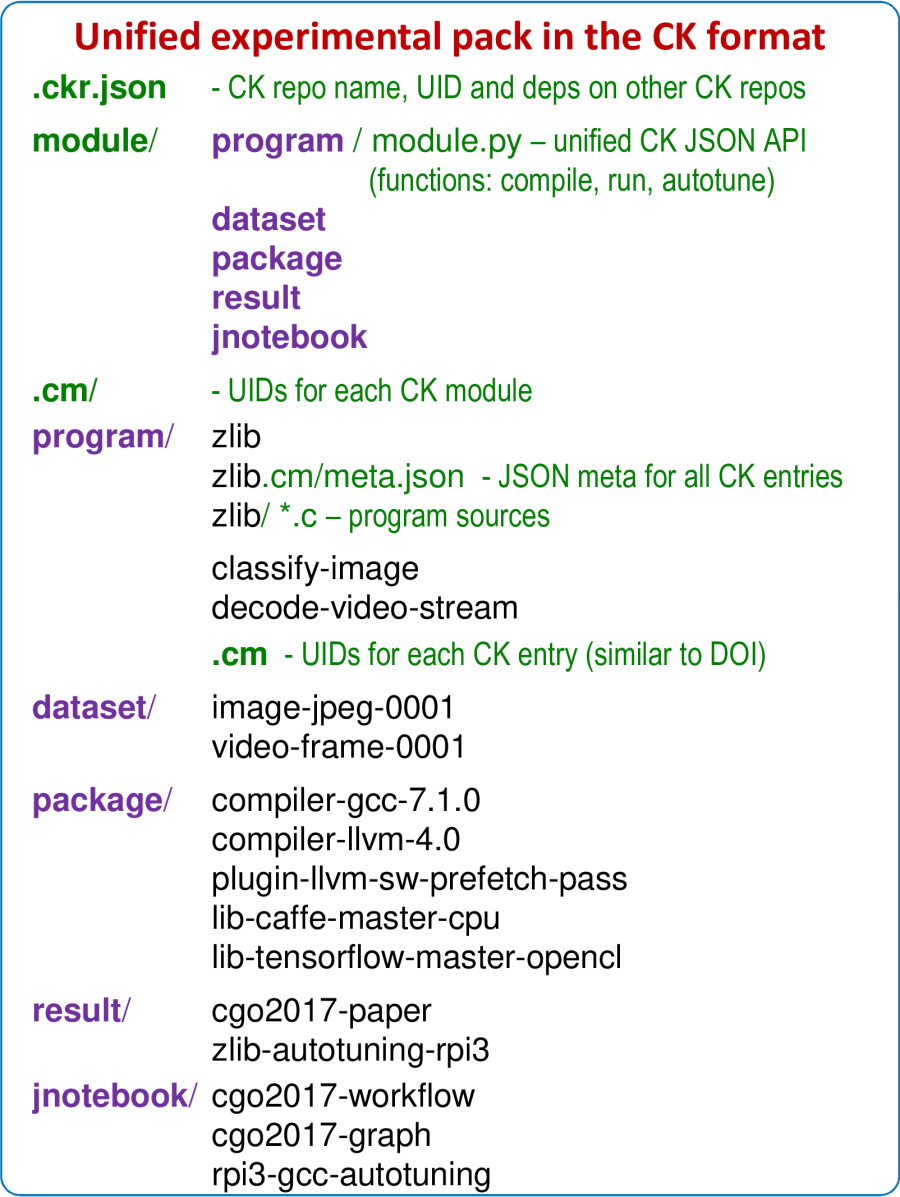
Note that this CK approach encourages reuse of all such existing CK modules from shared CK repositories rather then writing numerous ad-hoc scripts. It should indeed be possible to substitute most of ad-hoc scripts from public research projects (Figure 2) with just a few above modules and entries (Figure 6), and then collaboratively extend them, thus dramatically improving research productivity. For this reason, we keep track of all publicly shared modules and their repositories in this wiki page. The user will just need to add/update a .ckr.json file in the root directory of a given CK repository to describe a dependency on other existing CK repositories with required modules or entries. Since it is possible to uniquely reference any CK entry by two Unique IDs (module UID:object UID), we also plan to develop a simple web service to automatically index and discover all modules similar to DOI.
The open, file-based format of CK repositories allows researchers to continue editing entries and their meta directly using their favourite editors. It also simplifies exchange of these entries using Git repositories, zip archives, Docker images and any other popular tool. At the same time, schema-free and human readable Python dictionaries and JSON files helps users to collaboratively extend actions, API and meta information while keeping backward compatibility. Such approach should let the community to gradually and collaboratively convert and cross-link all existing ad-hoc code and data into unified components with extensible API and meta information. This, in turn, allows users organize their own research while reusing existing artifacts, building upon them, improving them and continuously contributing back to Collective Knowledge similar to Wikipedia.
We also noticed that CK can help students reduce preparation time for Artifact Evaluation [7] at conferences while automating preparation and validation of experiments since all artifacts, workflows and repositories are immediatelly ready to be shared, ported and plugged in to research workflows.
For example, the highest ranked artifact from the CGO'17 article [55] was implemented and shared using the CK framework [56]. That is why CK is now used and publicly extended by leading companies [35], universities [55] and organizations [57] to encourage, support and simplify technology transfer between academia and industry.
3 Assembling portable and customizable autotuning workflow
Autotuning combined with various run-time adaptation,
genetic and machine learning techniques is a popular approach
in computer systems research to automatically explore multi-dimensional
design and optimization spaces [10, 58, 59, 60, 11, 12, 13, 61, 14, 62, 15, 16, 17, 18, 19, 63, 20, 64, 65, 66, 67, 68, 69, 70, 29, 71, 72, 73].
CK allows to unify such techniques by developing a common, universal, portable, customizable, multi-dimensional and multi-objective autotuning workflow as a CK module (pipeline from the public ck-autotuning repository with the autotune function). This allows us to abstract autotuning by decoupling it from the autotuned objects such as "program". Users just need to provide a compatible function "pipeline" in a CK module which they want to be autotuned with a specific API including the following keys in both input and output:
●
●
●
●
●
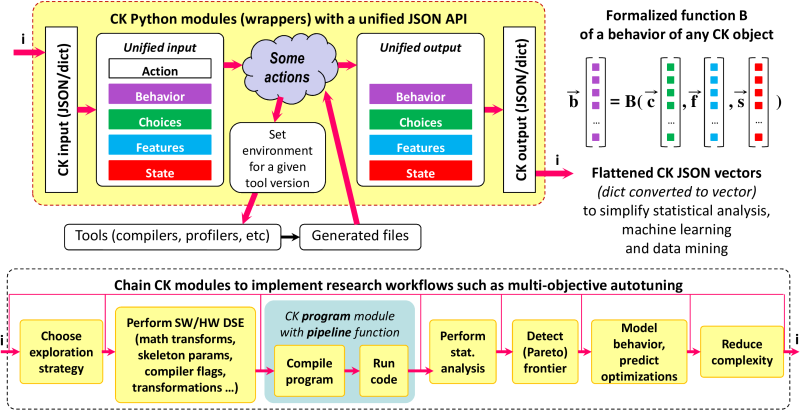
Autotuning can now be implemented as a universal and extensible workflow applied to any object with a matching JSON API by chaining together related CK modules with various exploration strategies, program transformation tools, compilers, program compilation and execution pipeline, architecture simulators, statistical analysis, Pareto frontier filter and other components, as conceptually shown in Figure 7. Researchers can also use unified machine learning CK modules (wrappers to R and scikit-learn [74]) to model the relationship between c, f, s and the observed behavior b, increase coverage, speed up (focus) exploration, and predict efficient optimizations [4, 6]. They can also take advantage of a universal complexity reduction module which can automatically simplify found solutions without changing their behavior, reduce models and features without sacrificing accuracy, localize performance issues via differential analysis [75], reduce programs to localize bugs, and so on.
Even more importantly, our concept of a universal autotuning workflow, knowledge sharing and artifact reuse can help teach students how to apply a well-established holistic and top-down experimental methodology from natural sciences to continuously learn and improve the behavior of complex computer systems [35, 4]. Researchers can continue exposing more design and optimization knobs c, behavioral characteristics b, static and dynamic features f, and run-time state state to optimize and model behavior of various interconnected objects from the workflow depending on their research interests and autotuning scenarios.
Such scenarios are also implemented as CK modules and describe which sets of choices to select, how to autotune them and which multiple characteristics to trade off. For example, existing scenarios include "autotuning OpenCL parameters to improve execution time", "autotuning GCC flags to balance execution time and code size", "autotune LLVM flags to reduce execution time", "automatically fuzzing compilers to detect bugs", "exploring CPU and GPU frequency in terms of execution time and power consumption", "autotuning deep learning algorithms in terms of speed, accuracy, energy, memory usage and costs", and so on.
You can see some of the autotuning scenarios using the following commands:
$ ck pull repo:ck-crowdtuning
$ ck search module --tags="program optimization"
$ ck list programThey can then be invoked from the command line as follows:
$ ck autotune program:[CK program alias] --scenario=[above CK scenario alias]
Indeed, the raising complexity of ever changing hardware
made development of compilers very challenging.
Popular GCC and LLVM compilers nowadays include hundreds
of optimizations (Figure 8)
and often fail to produce efficient code (execution time and code size)
on realistic workloads within a reasonable compilation time [10, 58, 76, 77, 4].
Such large design and optimization spaces mean
that hardware and compiler designers can afford to explore
only a tiny fraction of the whole optimization space
using just few ad-hoc benchmarks and data sets on a few architectures
in a tough mission to assemble -O3, -Os and other
optimization levels across all supported architectures and workloads.
Our idea is to keep compiler as a simple collection of code analysis and transformation routines
and separate it from optimization heuristics.
In such case we can use CK autotuning workflow to collaboratively optimize multiple
shared benchmarks and realistic workloads across diverse hardware, exchange optimization results,
and continuously learn and update compiler optimization heuristics for a given hardware
as a compiler plugin.
We will demonstrate this approach by randomly optimizing compiler flags
for susan corners program with aging GCC 4.9.2, the latest GCC 7.1.0
and compare them with Clang 3.8.1.
We already monitor and optimize execution time and code size of this popular image processing
application across different compilers and platforms for many years [24].
That is why we are interested to see if we can still improve it with the CK autotuner
on the latest Raspberry Pi 3 (Model B) devices (RPi3) extensively used for educational purposes.
First of all, we added susan program with corners algorithm
to the ctuning-programs repository with the JSON meta information
describing compilation and execution
as shown in Figure 9.
We can then test its compilation and execution by invoking the program pipeline as following:
CK program pipeline will first attempt to detect platform features
(OS, CPU, GPU) and embed them to the input dictionary using key features.
Note that in case of cross-compilation for a target platform different from the host one
(Android, remote platform via SSH, etc),
it is possible to specify such platform using CK os entries and --target_os= flag.
For example, it is possible to compile and run a given CK program for Android via adb as following:
Next, CK will try to resolve software dependencies and prepare environment for compilation
by detecting already installed compilers using CK soft:compiler.* entries
or installing new ones if none was found using CK package:compiler.*.
Each installed compiler for each target
will have an associated CK entry with prepared environment
to let computer systems researchers work with different
versions of different tools:
Automatically detected version of a selected compiler is used by CK
to find and preload all available optimization flags
from related compiler:* entries to the choices key
of a pipeline input.
An example of such flags and tags in the CK JSON format
for GCC 4.9 is shown in Figure 10.
The community can continue extending such descriptions for different compilers
including GCC, LLVM, Julia, Open64, PathScale, Java, MVCC, ICC and PGI
using either public ck-autotuning repository
or their own ones.
Finally, CK program pipeline compiles a given program, runs it on a target platform
and fills in sub-dictionary characteristics
with compilation time, object and binary sizes, MD5 sum of the binary, execution time,
used energy (if supported by a used platform), and all other obtained measurements
in the common pipeline dictionary.
We are now ready to implement universal compiler flag autotuning coupled with
this program pipeline.
For a proof-of-concept, we implemented GCC compiler flags exploration strategy
which automatically generate N random combinations of compiler flags,
compile a given program with each combination, runs it and record all results
(inputs and outputs of a pipeline) in a reproducible form in a local
CK repository using experiment module from
the ck-analytics
repository:
The JSON meta information of this module describes which keys to select
in the program pipeline, how to tune them, and which characteristics to monitor
and record as shown in Figure 11.
Note that a string starting with \#\# is used to reference any key
in a complex, nested JSON or Python dictionary (CK flat key [4]).
Such flat key always starts with \#
followed by \#key if it is a dictionary key or
@position_in_a_list if it is a value in a list.
CK also supports wild cards in such flat keys
such as "\#\#compiler_flags\#\*" and "\#\#characteristics\#\*
to be able to select multiple sub-keys, dictionaries
and lists in a given dictionary.
We can now invoke this CK experimental scenario from the command line as following:
CK will generate 300 random combinations of compiler flags, compile susan corners program
with each combination, run each produced code 3 times to check variation, and record
results in the experiment:tmp-susan-corners-gcc4-300-rnd.
We can now visualize these autotuning results using the following command line:
Figure 12 shows a manually annotated graph
with the outcome of GCC 4.9.2 random compiler flags autotuning
applied to susan corners on an RPi3 device in terms of execution
time with variation and code size.
Each blue point on this graph is related to one combination of random compiler flags.
The red line highlights the frontier of all autotuning results (not necessarily Pareto optimal)
which trade off execution time and code size during multi-objective optimization.
We also plotted points when default GCC compilation is used without any flags
or with -O3 and -Os optimization levels.
Finally, we decided to compare optimization results with Clang 3.8.1 also available on RPi3.
Besides showing that GCC -O3 (optimization choice A2)
and Clang -O3 (optimization choice A8) can produce a very similar code,
these results confirm well that it is indeed possible to automatically obtain execution time
and binary size of -O3 and -Os levels in comparison with non-optimized code
within tens to hundreds autotuning iterations (green improvement vectors with 3.6x execution time speedup
and 1.6x binary size improvement).
The graph also shows that it is possible to improve best optimization level -O3
much further and obtain 1.3x execution time speedup (optimization solution A6R
or obtain 11% binary size improvement without sacrifying original execution time
(optimization solution A4R).
Such automatic squeezing of a binary size without sacrificing performance
can be very useful for the future IoT devices.
Note that it is possible to browse all results in a user-friendly way
via web browser using the following command:
CK will then start internal CK web server
available in the ck-web
repository, will run a default web browser, and will
open a web page with all given experimental results.
Each experiment on this page has an associated button
with a command line to replay it via CK such as:
CK will then attempt to reproduce this experiment using the same input
and then report any differences in the output.
This simplifies validation of shared experimental results
(optimizations, models, bugs) by the community
and possibly with a different software and hardware setup
(CK will automatically adapt the workflow to a user platform).
We also provided support to help researchers
visualize their results as interactive graphs
using popular D3.js library as demonstrated in this
link.
Looking at above optimization results one may notice
that one of the original optimization solutions on a frontier A4
has 40 optimization flags, while A4R only 7 as shown in Table 1.
The natural reason is that not all randomly selected flags contribute to improvements.
That is why we developed a simple and universal complexity reduction algorithm.
It iteratively and randomly removes choices from a found solution one by one
if they do not influence monitored characteristics such as execution time and code size
in our example.
Such complexity reduction (pruning) of an existing solution can be invoked as following
(flag --prune_md5 tells CK to exclude a given choice without running code
if MD5 of a produced binary didn't change, thus considerably speeding up flag pruning):
The 'prune.json' file describes conditions on program pipeline keys
when a given choice should be removed as shown in Figure 13.
Such universal complexity reduction approach helps software engineers better understand
individual contribution of each flag to improvements or degradations of all monitored
characteristics such as execution time and code size as shown in Figure 14.
Asked by compiler developers, we also provided an extension to our complexity reduction module
to turn off explicitly all available optimization choices one by one
if they do not influence found optimization result.
Table 2 demonstrates this approach and shows all compiler optimizations contributing to the found optimization solution.
It can help improve internal optimization heuristics, global optimization levels such as -O3,
and improve machine learning based optimization predictions.
This extension can be invoked by adding flags --prune_invert --prune_invert_do_not_remove_key
when reducing complexity of a given solution such as:
We have been analyzing already aging GCC 4.9.2 because
it is still the default compiler for Jessy Debian distribution on RPi3.
However, we would also like to check how our universal autotuner
works with the latest GCC 7.1.0.
Since there is no yet a standard Debian GCC 7.1.0 package available for RPi3,
we need to build it from scratch.
This is not a straightforward task since we have to pick up correct
configuration flags which will adapt GCC build to quite outdated RPi3 libraries.
However, once we manage to do it, we can automate this process
using CK package module.
We created a public ck-dev-compilers repository
to automate building and installation of various compilers including GCC and LLVM via CK.
It is therefore possible to install GCC 7.1.0 on RPi3 as following
(see Appendix or GitHub repository ReadMe file for more details):
This CK package has an install.sh script which is customized
using environment variables or --env flags to build GCC for a target platform.
The JSON meta data of this CK package provides optional software dependencies
which CK has to resolve before installation (similar to CK compilation).
If installation succeeded, you should be able to see two prepared environments
for GCC 4.9.2 and GCC 7.1.0 which now co-exist in the system.
Whenever we now invoke CK autotuning, CK software and package manager
will detect multiple available versions of a required software dependency
and will let you choose which compiler version to use.
Let us now autotune the same susan corners program
by generating 300 random combinations of GCC 7.1.0 compiler flags
and record results in the experiment:tmp-susan-corners-gcc7-300-rnd:
Figure 15 shows the results of such GCC 7.1.0
compiler flag autotuning (B points) and compares them
against GCC 4.9.2 (A points).
Note that this graph is also available in interactive form online.
It is interesting to see considerable improvement in execution time of susan corners
when moving from GCC 4.9 to GCC 7.1 with the best optimization level -O3.
This graph also shows that new optimization added during the past 3 years opened up
many new opportunities thus considerably expanding autotuning frontier (light red
dashed line versus dark red dashed line).
Autotuning only managed to achieve a modest improvement of a few percent over -O3.
On the other hand, GCC -O3 and -Os are still far from achieving
best trade-offs for execution time and code size.
For example, it is still possible to improve a program binary size
by 10% (reduced solution B4R) without degrading best achieved
execution time with the -O3 level (-O3), or improve
execution time of -Os level by 28% while slightly degrading code size by 5%.
Note that for readers' convenience we added scripts to reproduce and validate
all results from this section to the following CK entries:
These results confirm that it is difficult to manually prepare compiler optimization
heuristic which can deliver good trade offs between execution time and code size
in such a large design and optimization spaces.
They also suggest that either susan corners or similar code
was eventually added to the compiler regression testing suite,
or some engineer check it manually and fixed compiler heuristic.
However, there is also no guarantee that future GCC versions will still
perform well on the susan corners program.
Neither these results guarantee that GCC 7.1.0
will perform well on other realistic workloads or devices.
Common experimental frameworks can help tackle this problem too by
crowdsourcing autotuning across diverse hardware provided by volunteers and combining it with online
classification, machine learning and run-time adaptation [5, 66, 6].
However, our previous frameworks did not cope well with "big data" problem
(cTuning framework [5, 9] based on MySQL database)
or were too "heavy" (Collective Mind aka cTuning 3 framework [4]).
Extensible CK workflow framework combined with our cross-platform package manager,
internal web server and machine learning, helped solve most of the above issues.
For example, we introduced a notion of a remote repository in the CK -
whenever such repository is accessed CK simply forward all JSON requests
to an appropriate web server.
CK always has a default remote repository remote-ck connected
with a public optimization repository running CK web serve
at cKnowledge.org/repo:
For example, one can see publicly available experiments from command line as following:
Such organization allows one to crowdsource autotuning, i.e. distributing autotuning
of given shared workloads in a cloud or across diverse platforms simply by using remote
repositories instead of local ones.
On the other hand, it does not address the problem of optimizing larger applications
with multiple hot spots.
It also does not solve the "big data" problem
when a large amount of data from multiple participants
needed for reproducibility will be continuously aggregated in a CK server.
However, we have been already addressing the first problem by either
instrumenting, monitoring and optimizing hot code regions in large applications
using our small "XOpenME" library, or even extracting such code regions
from a large application with a run-time data set and registering them
in the CK as standalone programs (codelets or computational species)
as shown in Figure 16
( [4]).
In the MILEPOST project [24]
we used a proprietary "codelet extractor" tool from CAPS Entreprise
(now dissolved) to automatically extract such hot spots with their data sets
from several real software projects and 8 popular benchmark suits
including NAS, MiBench, SPEC2000, SPEC2006, Powerstone, UTDSP and SNU-RT.
We shared those of them with a permissive license as CK programs
in the ctuning-programs repository
to be compatible with the presented CK autotuning workflow.
We continue adding real, open-source applications and libraries as CK program entries
(GEMM, HOG, SLAM, convolutions) or manually extracting and sharing interesting code
regions from them with the help of the community.
Such a large collection of diverse and realistic workloads
should help make computer systems research more applied and practical.
As many other scientists, we also faced a big data problem when continuously
aggregating large amounts of raw optimization data during crowd-tuning
for further processing including machine learning [9].
We managed to solve this problem in the CK by using
online pre-processing of raw data and online classification
to record only the most efficient optimization solutions
(on a frontier in case of multi-objective autotuning)
along with unexpected behavior (bugs and numerical
instability) [6].
It is now possible to invoke crowd-tuning of GCC compiler flags (improving execution time) in the CK as following:
or
In contrast with traditional autotuning, CK will first query remote-ck repository
to obtain all most efficient optimization choices aka solutions (combinations of random compiler flags in our example)
for a given trade-off scenario (GCC compiler flag tuning to minimize execution time), compiler version,
platform and OS.
CK will then select a random CK program (computational species),
compiler and run it with all these top optimizations,
and then try N extra random optimizations (random combinations of GCC flags)
to continue increasing design and optimization space coverage.
CK will then send the highest improvements of monitored characteristics
(execution time in our example) achieved for each optimization solution as well as worst degradations
back to a public server.
If a new optimization solution if also found during random autotuning,
CK will assign it a unique ID (solution_uid
and will record it in a public repository.
At the public server side, CK will merge improvements and degradations for a given
program from a participant with a global statistics while recording how many programs
achieved the highest improvement (best species) or worst degradation (worst species) for a given optimization
as shown in Figure 17.
This figure shows a snapshot of public optimization results
with top performing combinations of GCC 4.9.2 compiler flags
on RPi3 devices which minimize execution time of shared CK workloads
(programs and data sets) in comparison with -O3 optimization level.
It also shows the highest speedup and the worse degradation achieved
across all CK workloads for a given optimization solution, as well
as a number of workloads where this solution was the best or the worst
(online classification of all optimization solutions).
Naturally this snapshot automatically generated from the public repository
at the time of publication may slightly differ from continuously updated
live optimization results available at this link.
These results confirm that GCC 4.9.2 misses many optimization opportunities
not covered by -O3 optimization level.
Figure 18 with optimization results
for GCC 7.1.0 also confirms that this version was considerably improved
in comparison with GCC 4.9.2
(latest live results are available in our public optimization repository
at this link):
there are fewer efficient optimization solutions found during crowd-tuning
14 vs 23 showing the overall improvement of the -O3 optimization level.
Nevertheless, GCC 7.1.0 still misses many optimization opportunities
simply because our long-term experience suggests that it is infeasible
to prepare one universal and efficient optimization heuristics
with good multi-objective trade-offs for all continuously
evolving programs, data sets, libraries, optimizations and platforms.
That is why we hope that our approach of combining a common workflow framework
adaptable to software and hardware changes, public repository of optimization knowledge,
universal and collaborative autotuning across multiple hardware platforms
(e.g. provided by volunteers or by HPC providers), and community involvement
should help make optimization and testing of compilers
more automatic and sustainable [6, 35].
Rather than spending considerable amount of time on writing their own autotuning and crowd-tuning
frameworks, students and researchers can quickly reuse shared workflows,
reproduce and learn already existing optimizations, try to improve optimization heuristics,
and validate their results by the community.
Furthermore, besides using -Ox compiler levels, academic and industrial users
can immediately take advantage of various shared optimizations solutions automatically
found by volunteers for a given compiler and hardware via CK using solution_uid flag.
For example, users can test the most efficient combination of compiler flags
which achieved the highest speedup for GCC 7.1.0 on RPi3
(see "Copy CID to clipboard for a given optimization solution at this
link)
for their own programs using CK:
or
We can now autotune any of these programs via CK as described in Section 4.
For example, the following command will autotune zlib decode workload
with 150 random combinations of compiler flags including parametric and architecture
specific ones, and will record results in a local repository:
Figure 19
(link with interactive graph)
shows a manually annotated graph with the outcome of such autotuning
when using GCC 4.9.2 compiler on RPi3 device
in terms of execution time with variation and code size.
Each blue point on this graph is related to one combination of random compiler flags.
The red line highlights the frontier of all autotuning results
to let users trade off execution time and code size
during multi-objective optimization.
Similar to graphs in Section 4, we also plotted points
when using several main GCC and Clang optimization levels.
In contrast with susan corners workload, autotuning did not improve execution time
of zlib decode over -O3 level most likely because this algorithm is present
in many benchmarking suits.
On the other hand, autotuning impressively improved code size over -O3
by nearly 2x without sacrificing execution time, and by 1.5x with 11% execution time
improvement over -Os (reduced optimization solution A4R),
showing that code size optimization is still a second class citizen.
Since local autotuning can still be quite costly (150 iterations to achieve above results),
we can now first check 10..20 most efficient combinations of compiler flags
already found and shared by the community for this compiler and hardware
(Figure 17).
Note that programs from this section did not participate in crowd-tuning
to let us have a fair evaluation of the influence of shared optimizations
on these programs similar to leave-one-out cross-validation in machine learning.
Figure 20 shows "reactions"
of zlib decode to these optimizations in terms of execution time and code size
(the online interactive graph).
We can see that crowd-tuning solutions indeed cluster in a relatively small area
close to -O3 with one collaborative solution (C1) close to the
best optimization solution found during lengthy autotuning (A4R)
thus providing a good trade off between autotuning time, execution time and code size.
Autotuning zlib decode using GCC 7.1.0 revels even more interesting results
in comparison with susan corners as shown in Figure 21
(the online interactive graph).
While there is practically no execution time improvements when switching from GCC 4.9.2 to GCC 7.1.0
on -O3 and -Os optimization levels, GCC 7.1.0 -O3 considerably degraded code size by nearly 20%.
Autotuning also shows few opportunities on GCC 7.1.0 in comparison with GCC 4.9.2
where the best found optimization B4R is worse in terms of a code size than A4R also by around 20%.
These results highlight issues which both end-users and compiler designers face
when searching for efficient combinations of compiler flags or preparing the
default optimization levels -Ox.
CK crowd-tuning can assist in this case too - Figure 22
shows reactions of zlib decode to the most efficient combinations of GCC 7.1.0 compiler flags
shared by the community for RPi3
(the online interactive graph).
Shared optimization solution C2 achieved the same results in terms of execution time and code size
as reduced solution B4R found during 150 random autotuning iterations.
Furthermore, another shared optimization solution C1 improved code size by 15% in comparison
with GCC 7.1.0 autotuning solution B4R and is close to the best solution GCC 4.9.2 autotuning solution A4R.
These results suggest that 150 iterations with random combinations of compiler flags
may not be enough to find an efficient solution for zlib decode.
In turn, crowd-tuning can help considerably accelerate and focus such optimization space exploration.
We performed the same autotuning and crowd-tuning experiments for zlib encode workload
with the results shown in Figures 23, 24, 25, 26.
The results show similar trend that -O3 optimization level of both GCC 4.7.2 and GCC 7.1.0
perform well in terms of execution time, while there is the same degradation in the code size when moving to a new compiler
(since we monitor the whole zlib binary size for both decode and encode functions).
Crowd-tuning also helped improve the code size though optimizations A4R, B4R and C1
are not the same as in case of zlib decode.
The reason is that algorithms are different and need different optimizations
to keep execution time intact while improving code size.
Such result provides an extra motivation for function-level optimizations
already available in GCC.
Besides zlib, we applied crowd-tuning with the best found and shared optimizations
to other RPi programs using GCC 4.9.2 and GCC 7.1.0.
Table 3 shows reactions of these optimizations
with the best trade-offs for execution time and code size.
One may notice that though GCC 7.1.0 -O3 level improves execution time
of most of the programs apart from a few exceptions, it also considerably degrades
code size in comparison with GCC 4.9.2 -O3 level.
These results also confirm that neither -O3 nor -Os on both
GCC 4.9.2 and GCC 7.1.0 achieves the best trade-offs for execution
time and code size thus motivating again our collaborative and continuous optimization
approach.
Indeed, a dozen of shared most efficient optimizations at cKnowledge.org/repo
is enough to either improve execution time of above programs by up to 1.5x or code size by up to 1.8x or even
improve both size and speed at the same time.
It also helps end-users find the most efficient optimization no matter which compiler, environment and hardware are used.
We can also notice that 11 workloads (computational species)
share -O3 -fno-inline -flto combination of flags
to achieve the best trade-off between execution time and code size.
This result supports our original research to use workload features,
hardware properties, crowd-tuning and machine learning
to predict such optimizations [5, 24, 6].
However, in contrast with the past work, we are now able
to gradually collect a large, realistic (i.e. not randomly
synthesized) set of diverse workloads with the help of the
community to make machine learning statistically meaningful.
All scripts to reproduce experiments from this section are available in the following CK entries:
Our CK-based customizable autotuning workflow can assist in creating,
learning and improving such collaborative fuzzers
which can distribute testing across diverse platforms and workloads
provided by volunteers while sharing and reproducing bugs.
We just need to retarget our autotuning workflow to search for
bugs instead of or together with improvements in performance,
energy, size and other characteristics.
We prepared an example scenario experiment.tune.compiler.flags.gcc.fuzz
to randomly generate compiler flags for any GCC and record only cases
with failed program pipeline.
One can use it in a same way as any CK autotuning while selecting
above scenario as following:
It is then possible to view all results with unexpected behavior
in a web browser and reproduce individual cases
on a local or different machine as following:
We performed the same auto-fuzzing experiments for susan corners program
with both GCC 4.9.2 and GCC 7.1.0 as in Section 4.
These results are available in the following CK entries:
Figure 27 shows a simple example of reproducing
a GCC bug using CK together with the original random combination of flags
and the reduced one.
GCC flag -fcheck-data-deps compares several passes for dependency analysis
and report a bug in case of discrepancy.
Such discrepancy was automatically found when autotuning susan corners
using GCC 4.9.2 on RPi3.
Since CK automatically adapts to a user environment, it is also possible
to reproduce the same bug using a different compiler version.
Compiling the same program with the same combination of flags on the same platform
using GCC 7.1.0 showed that this bug has been fixed in the latest compiler.
We hope that our extensible and portable benchmarking workflow will help students and engineers
prototype and crowdsource different types of fuzzers.
It may also assist even existing projects [81, 82]
to crowdsource fuzzing across diverse platforms and workloads.
For example, we collaborate with colleagues from Imperial College London
to develop CK-based, continuous and collaborative OpenGL and OpenCL compiler
fuzzers [83, 84, 85]
while aggregating results from users in public or private repositories
( link to public OpenCL fuzzing results across diverse desktop and mobile platforms).
All scripts to reproduce experiments from this section are available in the following CK entry:
To demonstrate our approach, we converted all our past research artifacts
on machine learning based optimization and SW/HW co-design
to CK modules.
We then assembled them to a universal Collective Knowledge workflow
shown in Figure 28.
If you do not know about machine learning based compiler optimizations,
we suggest that you start from our MILEPOST GCC paper [24]
to make yourself familiar with terminology
and methodology for machine learning training
and prediction used further.
Next, we will briefly demonstrate the use of this customizable workflow
to continuously classify shared workloads presented in this report
in terms of the most efficient compiler optimizations
while using MILEPOST models and features.
First, we query the public CK repository [38]
to collect all optimization statistics together with all associated objects
(workloads, data sets, platforms) for a given optimization scenario.
In our compiler flag optimization scenario, we retrieve all
most efficient compiler flags combinations found and shared
by the community when crowd-tuning GCC 4.9.2 on RPi3 device
(Figure 17).
Note that our CK crowd-tuning workflow also continuously applies
such optimization to all shared workloads.
This allows us to analyze "reaction" of any given workload
to all most efficient optimizations.
We can then group together those workloads which exhibit similar reactions.
The top graph in Figure 29 shows reactions of all workloads
to the most efficient optimizations as a ratio of the default execution time (-O3)
to the execution time of applied optimization.
It confirms yet again ([6]) that there is no single "winning"
combination of optimizations and they can either considerably improve or degrade execution time
on different workloads.
It also confirms that it is indeed possible to group together multiple workloads
which share the most efficient combination of compiler flags, i.e. which achieve
the highest speedup for a common optimization as shown in the bottom graph
in Figure 29.
Figure 30 shows similar trends for GCC 7.1.0 on the same RPi3 device
even though the overall number of the most efficient combinations of compiler flags is smaller
than for GCC 4.9.2 likely due to considerably improved internal optimization heuristics over the past years
(see Figure 18).
Having such groups of labeled objects (where labels are the most efficient optimizations
and objects are workloads) allows us to use standard machine learning classification methodology.
One must find such a set of objects' features and a model which maximizes
correct labeling of previously unseen objects, or in our cases can correctly predict
the most efficient software optimization and hardware design for a given workload.
As example, we extracted 56 so-called MILEPOST features described in [24]
(static program properties extracted from GCC's intermediate representation)
from all shared programs, stored them in program.static.features,
and applied simple nearest neighbor classifier to above data.
We then evaluated the quality of such model (ability to predict) using prediction accuracy
during standard leave-one-out cross-validation technique: for each workload we remove it
from the training set, build a model, validate predictions, sum up all correct predictions
and divide by the total number of workloads.
Table 4 shows this prediction accuracy
of our MILEPOST model for compiler flags from GCC 4.9.2 and GCC 7.1.0
across all shared workloads on RPi3 device.
One may notice that it is nearly twice lower than in the
original MILEPOST
paper [24].
As we explain in [6],
in the MILEPOST project we could only use a dozen of similar
workloads and just a few most efficient optimizations to be
able to perform all necessary experiments within a reasonable
amount of time (6 months).
After brining the community on hoard, we could now use a much larger
collective training set with more than 300 shared, diverse
and non-synthesized workloads while analyzing much more optimizations
by crowdsourcing autotuning.
This helps obtain a more realistic limit of the MILEPOST predictor.
Though relatively low, this number can now become a
reference point to be further improved by the community.
It is similar in spirit to the ImageNet Large Scale Visual Recognition Competition
(ILSVRC) [89]
which reduced image classification error rate from 25%
in 2011 to just a few percent with the help of the community.
Furthermore, we can also keep just a few representative
workloads for each representative group as well as misclassified ones in
a public repository thus producing a minimized, realistic and
representative training set for systems researchers.
We shared all demo scripts which we used to generate data and
graphs in this section in the following CK entry (however they are not yet
user-friendly and we will continue improving documentation and
standardizing APIs of reusable CK modules with the help of the community):
Even artifact evaluation which we introduced at systems
conferences [100] to partially solve these issues is not
yet enough because our community does not have a common,
portable and customizable workflow framework.
Bridging this gap between machine learning and systems research
served as an additional motivation to develop Collective Knowledge
workflow framework.
Our idea is to help colleagues and students share various workloads,
data sets, machine learning algorithms, models and feature extractors
as plugins (CK modules) with a common API and meta description.
Plugged to a common machine learning workflow such modules
can then be applied in parallel to continuously compete
for the most accurate predictions for a given optimization scenario.
Furthermore, the community can continue improving and autotuning models,
analyzing various combination of features, experimenting with hierarchical models,
and pruning models to reduce their complexity across shared data sets
to trade off prediction accuracy, speed, size and the ease of interpretation.
For a proof-of-concept of such collaborative learning approach,
we shared a number of customizable CK modules (see ck search module:*model*)
for several popular classifiers including the nearest neighbor,
decision trees and deep learning.
These modules serve as wrappers with a common CK API for
TensorFlow, scikit-learn, R and other machine learning frameworks.
We also shared several feature extractors (see ck search module:*features*)
assembling the following groups of program features
which may influence predictions:
We then attempted to autotune various parameters
of machine learning algorithms exposed via CK API.
Figure 31
shows an example of autotuning the depth of a decision tree
(available as customizable CK plugin) with all shared groups of features
and its impact on prediction accuracy of compiler flags using MILEPOST
features from the previous section for GCC 4.9.2 and GCC 7.1.0
on RPi3.
Blue round dots obtained using leave-one-out validation suggest
that decision trees of depth 8 and 4 are enough
to achieve maximum prediction accuracy of 0.4% for GCC 4.9.2
and GCC 7.1.0 respectively.
Model autotuning thus helped improve prediction accuracy in comparison
with the original nearest neighbor classifier from the MILEPOST project.
Figure 32 shows a few examples of such automatically
generated decision trees with different depths for GCC 7.1.0 using CK.
Such trees are easy to interpret and can therefore help compiler and hardware
developers quickly understand the most influential features and analyze
relationships between different features and the most efficient
optimizations.
For example, the above results suggest that the number of binary integer operations (ft22)
and the number of distinct operators (ft59) can help predict optimizations
which can considerably improve execution time of a given method over -O3.
Turning off cross-validation can also help developers understand
how well models can perform on all available workloads (in-sample data)
(red dots on Figure 31).
In our case of GCC 7.1.0, the decision tree of depth 15 shown in Figure 32)
is enough to capture all compiler optimizations for 300 available workloads.
To complete our demonstration of CK concepts for collaborative machine learning and optimization,
we also evaluated a deep learning based classifier from TensorFlow [102]
(see ck help module:model.tf)
with 4 random configurations of hidden layers ([10,20,10], [21,13,21], [11,30,18,20,13], [17])
and training steps (300..3000).
We also evaluated the nearest neighbor classifier used in the MILEPOST project but with different groups of features
and aggregated all results in Table 5.
Finally, we automatically reduced the complexity of the nearest neighbor classifier (1) by iteratively removing those features one by one
which do not degrade prediction accuracy and (2) by iteratively adding features one by one to maximize prediction accuracy.
It is interesting to note that our nearest neighbor classifier achieves
a slightly better prediction accuracy with a reduced feature set than with
a full set of features showing inequality of MILEPOST features
and overfitting.
As expected, deep learning classification achieves a better prediction accuracy of 0.68%
and 0.45% for GCC 4.9.2 and GCC 7.1.0 respectively for RPi3 among currently shared models,
features, workloads and optimizations.
However, since deep learning models are so much more computationally intensive, resource hungry
and difficult to interpret than decision trees, one must carefully balance accuracy vs speed vs size.
That is why we suggest to use hierarchical models where
high-level and coarse-grain program behavior is quickly captured
using decision trees, while all fine-grain behavior is captured
by deep learning and similar techniques.
Another possible use of deep learning can be in automatically capturing
influential features from the source code, data sets and hardware.
All scripts to generate above experiments (require further documentation)
are available in the following CK entry:
First, we converted 474 different data sets from the MiDataSet suite [103]
as pluggable CK artifacts and shared them as a zip archive ( 800MB).
It is possible to download it from the Google Drive
from https://drive.google.com/open?id=0B-wXENVfIO82OUpZdWIzckhlRk0
(we plan to move it to a permanent repository in the future)
and then install via CK as following:
All these data sets will be immediately visible to all related programs
via the CK autotuning workflow.
For example, if we now run susan corners program, CK will prompt user
a choice of 20 related images from the above data sets:
Next, we can apply all most efficient compiler optimizations
to a given program with all data sets.
Figure 33 shows such reactions
(ratio of an execution time with a given optimization to an execution time
with the default -O3 compiler optimization) of a jpeg decoder across
20 different jpeg images from the above MiDataSet on RPi3.
One can observe that the same combination of compiler flags can both
considerably improve or degrade execution time for the same program
but across different data sets.
For example, data sets 4,5,13,16 and 17 can benefit from the most
efficient combination of compiler flags found by the community
with speedups ranging from 1.2 to 1.7.
On the other hand, it's better to run all other data sets with
the default -O3 optimization level.
Unfortunately, finding data set and other features which could easily differentiate
above optimizations is often very challenging.
Even deep learning may not help if a feature is not yet exposed.
We explain this issue in [6]
when optimizing real B&W filter kernel - we managed to improve
predictions by exposing a "time of the day" feature
only via human intervention.
However, yet again, the CK concept is to bring the interdisciplinary
community on board to share such cases in a reproducible way
and then collaboratively find various features to improve predictions.
Another aspect which can influence the quality of predictive models,
is that the same combinations of compiler flags are too coarse-grain
and can make different internal optimization decisions
for different programs.
Therefore, we need to have an access to fine-grain optimizations
(inlining, tiling, unrolling, vectorization, prefetching, etc)
and related features to continue improving our models.
However, this follows our top-down optimization and modeling methodology
which we implemented in the Collective Knowledge framework.
We want first to analyze, optimize and model coarse-grain behavior of shared workloads
together with the community and students while gradually adding more workloads,
data sets, models and platforms.
Only when we reached the limit of prediction accuracy,
we start gradually exposing finer-grain optimizations
and features via extensible CK JSON interface
while avoiding explosion in design and optimization spaces
(see details in [4] for our previous
version of the workflow framework, Collective Mind).
This is much in spirit of how physicists moved from Newton's
three coarse-grain laws of motion to fine-grain quantum mechanics.
To demonstrate this approach, we shared a simple skeletonized
matrix multiply kernel from [104] in the CK format
with blocking (tiling) parameter and data set feature
(square matrix size) exposed via CK API:
We can then reuse universal autotuning (exploration) strategies
available as CK modules or implement specialized ones to explore
exposed fine-grain optimizations versus different data sets.
Figure 34 shows matmul performance
in GFLOPS during random exploration of a blocking parameter for different square
matrix sizes on RPi3.
These results are in line with multiple past studies showing that
unblocked matmul is more efficient for small matrix sizes (less than 32
on RPi3) since all data fits cache, or between 32 and 512 (on RPi3)
if they are not power of 2.
In contrast, the tiled matmul is better on RPi3 for matrix sizes of power of 2 between 32 and 512,
since it can help reduce cache conflict misses, and for all matrix sizes more than 512
where tiling can help optimize access to slow main memory.
Our customizable workflow can help teach students how to build efficient,
adaptive and self-optimizing libraries including BLAS, neural networks and FFT.
Such libraries are assembled from the most efficient routines
found during continuous crowd-tuning across numerous data sets and platforms,
and combined with fast and automatically generated decision trees
or other more precise classifiers [105, 106, 107, 6].
The most efficient routines are then selected at run-time
depending on data set, hardware and other features as conceptually shown
in Figure 35..
All demo scripts to generate data and graphs in this section are available in the following CK entries:
This is in spirit with existing machine learning competitions
such as Kaggle and ImageNet challenge [108, 109]
to improve prediction accuracy of various models.
The main difference is that we want to focus on
optimizing the whole software/hardware/model stack
while trading off multiple metrics including speed, accuracy,
and costs [40, 6, 110].
Experimental results from such competitions can be continuously aggregated
and presented in the live Collective Knowledge scoreboard [38].
Other academic and industrial researchers can then pay
a specific attention to the "winning" techniques close
to a Pareto frontier in a multi-dimensional
space of accuracy, execution time, power/energy consumption,
hardware/code/model footprint, monetary costs etc
thus speeding up technology transfer.
Furthermore, "winning" artifacts and workflows can now be recompiled,
reused and extended on the newer platforms with the latest
environment thus improving overall research sustainability.
For a proof-of-concept, we started helping some authors convert their
artifacts and experimental workflows to the CK format during
Artifact Evaluation [111, 55, 7].
Association for Computing Machinery (ACM) [112]
also recently joined this effort funded by the Alfred P. Sloan Foundation
to convert already published experimental workflows
and artifacs from the ACM Digital Library
to the CK format [113].
We can then reuse CK functionality to crowdsource benchmarking and multi-objective
autotuning of shared workloads across diverse data sets, models and platforms.
For example, Figure 36 shows
results from random exploration of various SLAM algorithms (Simultaneous localization and mapping)
and their parameters from [114] in terms of accuracy (average trajectory error or ATE)
versus speed (frames per second) on RPi3 using CK [115].
Researchers may easily spend 50% of their time developing
experimental, benchmarking and autotuning infrastructure
in such complex projects, and then continuously
updating it to adapt to ever changing software and hardware
instead of innovating.
Worse, such ad-hoc infrastructure may not even survive
the end of the project or if leading developers leave project.
Using common and portable workflow framework can relieve researchers
from this burden and let them reuse already existing artifacts and
focus on innovation rather than re-developing ad-hoc software from scratch.
Other researchers can also pick up the winning designs on a Pareto frontier,
reproduce results via CK, try them on different platforms
and with different data sets, build upon them,
and eventually try to develop more efficient algorithms.
Finally, researchers can implement a common experimental methodology
to evaluate empirical results in systems research similar to physics
within a common workflow framework rather than writing their own
ad-hoc scripts.
Figure 37 shows statistical analysis
of experimental results implemented in the CK to compare different
optimizations depending on research scenarios.
For example, we report minimal execution time from multiple experiments
to understand the limits of a given architecture, expected value to see
how a given workload performs on average, and max time to detect
abnormal behavior.
If more than one expected value is detected, it usually means
that system was in several different run-time states during experiments
(often related to adaptive changes in CPU and GPU frequency due to DVFS)
and extra analysis is required.
We now plan to validate our Collective Knowledge approach
in the 1st reproducible ReQuEST tournament
at the ACM ASPLOS'18 conference [40]
as presented in Figure 38.
ReQuEST is aimed at providing a scalable tournament framework,
a common experimental methodology and an open repository for continuous evaluation
and optimization of the quality vs. efficiency Pareto optimality of a wide range
of real-world applications, libraries, and models across the whole
hardware/software stack on complete platforms.
ReQuEST also promote reproducibility of experimental results and reusability/customization
of systems research artifacts by standardizing evaluation methodologies and facilitating
the deployment of efficient solutions on heterogeneous platforms.
ReQuEST will use CK and our artifact evaluation methodology [7]
to provide unified evaluation and a live scoreboard of submissions.
Figure 39 shows a proof-of-concept example of such a
scoreboard powered by CK to collaboratively benchmark inference (speed vs. platform cost)
across diverse deep learning frameworks (TensorFlow, Caffe, MXNet, etc.),
models (AlexNet, GoogleNet, SqueezeNet, ResNet, etc.), real user data sets, and mobile devices
provided by volunteers (see the latest results at cKnowledge.org/repo).
Our goal is to teach students and researchers how to
The major issues including raising complexity, lack of a common experimental framework
and lack of practical knowledge exchange between academia and industry.
Rather than innovating, researchers have to spend more and more time
writing their own, ad-hoc and not easily customizable support tools
to perform experiments such as multi-objective autotuning.
We presented our long-term educational initiative to teach
students and researchers how to solve the above problems
using customizable workflow frameworks similar to other sciences.
We showed how to convert ad-hoc, multi-objective
and multi-dimensional autotuning into a portable and customizable workflow
based on open-source Collective Knowledge workflow framework.
We then demonstrated how to use it to implement various scenarios
such as compiler flag autotuning of benchmarks and realistic workloads
across Raspberry Pi 3 devices in terms of speed and size.
We also demonstrated how to crowdsource such autotuning across different
devices provided by volunteers similar to SETI@home, collect the most efficient optimizations
in a reproducible way in a public repository of knowledge at cKnowledge.org/repo,
apply various machine learning techniques including decision trees, the nearest neighbor classifier
and deep learning to predict the most efficient optimizations for previously
unseen workloads, and then continue improving models and features
as a community effort.
We now plan to develop an open web platform together with the community
to provide a user-friendly front-end to all presented workflows
while hiding all complexity.
We use our methodology and open-source CK workflow framework and repository
to teach students how to exchange their research artifacts and results
as reusable components with a a unified API and meta-information,
perform collaborative experiments, automate Artifact Evaluation
at journals and conferences [7], build upon each others' work,
make their research more reproducible and sustainable,
and eventually accelerate transfer of their ideas to industry.
Students and researchers can later use such skills and unified artifacts
to participate in our open ReQuEST tournaments on reproducible and Pareto-efficient
co-design of the whole software and hardware stack for emerging workloads
such as deep learning and quantum computing in terms of
speed, accuracy, energy and costs [40].
This, in turn, should help the community build an open repository of
portable, reusable and customizable algorithms continuously optimized
across diverse platforms, models and data sets
to assemble efficient computer systems
and accelerate innovation.
We would like to thank Raspberry Pi foundation for initial financial support.
We are also grateful to Flavio Vella, Marco Cianfriglia, Nikolay Chunosov, Daniil Efremov, Yuriy Kashnikov,
Peter Green, Thierry Moreau, ReQuEST colleagues, and the Collective Knowledge community
for evaluating Collective Knowledge concepts and providing useful feedback.
Submission guidelines: This is an example of an Artifact Appendix which we introduced
at the computer systems conferences including CGO, PPoPP, PACT and SuperComputing
to gradually unify artifact evaluation, sharing and reuse [7, 8, 9, 5].
We briefly describe how to install and use our autotuning workflow, visualize optimization results and reproduce them.
We also shared all scripts which we used to generate data and
graphs in all sections from this report though we did not yet
have time to thoroughly document them.
In fact, we plan to gradually document them and standardize APIs
of shared CK modules with the help of the community and motivated students.
We provided the whole Collective Knowledge workflow with all dependencies
for collaborative, customizable, multi-dimensional and multi-objective autotuning
of realistic workloads on Raspberry Pi 3 and other devices.
Current optimization results are available for GCC 7.1.0 (link)
and for GCC 4.9.2 (link).
They are also available as a CK repository
and can be replayed on another platform via CK.
You can obtain CK repositories with optimization results, shared programs and data sets, workflow for autotuning and crowd-tuning as following:
Note that you may need around 1GB of free space. You can install 2 additional CK repositories [116]
from the public FigShare repository as following (need 3GB of free space):
These repositories are so large because they contain all experiments from this report in a reproducible way
(we also plan to considerably reduce this size by removing duplicate information in the future).
But if you want to prepare and run your own repositories you will likely need less than 100MB.
See this artifact in the CK from the ACM CGO'17 paper [55] as example:
github.com/SamAinsworth/reproduce-cgo2017-paper
Tested on Raspberry Pi Model B 3 devices with 4-core BCM2709 processor but should work on any platform.
A minimal set of inputs for cTuning benchmarks available from the CK ctuning-datasets-min repository.
Installation is performed using CK with the help of integrated cross-platform package manager [52]:
CK will automatically detect required software which is already installed on your platform,
install missing packages, and prepare autotuning workflow for execution.
Note that CK allows multiple versions of different software to natively co-exist.
Therefore, you can install several versions of GCC which will be automatically
detected by CK and their environment prepared accordingly.
For example, you can install (build) GCC 7.1.0 on RPi 3 via CK as following:
Note that you may need to install extra dependencies including
You may also want to increase a swap size on RPi 3 to speed up GCC building.
You can change "CONF_SWAPSIZE=100" in /etc/dphys-swapfile to "CONF_SWAPSIZE=1000".
But do not forget to change it back after successful build to avoid damaging your SD card.
Autotuning example
You can run zlib autotuning via CK as following:
CK will automatically detect available compilers, will ask user to select data set,
and will evaluate 150 combinations of random compiler flags
(repeating each experiment 3 times for statistical analysis
of empirical variation of results).
Experimental results will be aggregated in a CK entry "experiment:my-first-experiment" a local CK repository:
You can plot graph (execution time vs binary size) or view results in a web browser as following:
You can compile and run zlib program via CK as following:
Finally, you can participate in GCC crowd-tuning as following:
You can find all scripts to perform experiments from this article as following:
You can then go to each individual entry and see related scripts:
You can find all experimental results in the following entries:
You can then browse all results in your web browser as following:
You can find information about how to replay each autotuning iteration there, for example:
CK should normally show expected and new results while reporting any unexpected
behavior (if difference is more than some threshold such as 5%).
One of the most important points of using Collective Knowledge framework
is to take advantage of the experimental methodology for computer systems research
continuously improved by the community.
For this purpose, we instrument programs using a small xOpenME library [4]
which allows us to monitor behavior of some code regions and dump
final statistics to a JSON file in the CK format.
CK will then repeat each autotuning iteration N times,
apply statistical analysis on all exposed characteristics, report min, max and mean values,
and calculate expected value based on a histogram of all results (if supported by used Python)
as shown in Figure 37 (a).
We then calculate improvements of a given optimization over reference one (-O3)
using minimal and expected execution times, and record differences.
If the difference is more than 5%, we mark such experient is noise and untrustable
to be analyzed and improved later by the community.
If several system states are detected as shown in Figure 37 (b),
CK will not be able to reproduce them - it then means that the common CK experimental workflow
should also be improved for this hardware and environment to be able to distinguish such
states (such as CPU and GPU frequency due to DVFS for example).
We did not have time to thoroughly document experiments from sections 7+ of this report.
However we shared all CK modules, workflows and scripts we used in this report
in the following CK entries:
Scripts from Sections 3 and 4
to invoke portable and customizable CK autotuning workflow:
Scripts from Section 5:
Scripts from Section 6:
Scripts from Section 7:
Scripts from Sections 8 and 9:
Scripts from Section 10: //input-aware
Scripts from Section 11:
We hope that our customizable autotuning and machine learning workflow
can teach students, scientists and engineers learn how to collaboratively
co-design Pareto-efficient software and hardware stack for emerging workloads.
Please feel free to send us updates and patches to fix, help us improve or extend
our artifacts with documentation, and keep in touch with our community via
CK mailing list: groups.google.com/d/forum/collective-knowledge!
4 Implementing universal compiler flag autotuning
In this section we would like to show how to
customize our universal autotuning workflow
to tackle an old but yet unsolved problem
of finding the most efficient
selection of compiler flag which minimizes
program size and execution time.
$ ck pipeline program:cbench-automotive-susan
$ ck ls os
$ ck pipeline program:cbench-automotive-susan --target_os=android21-arm64
$ ck show env
$ ck show env --target_os=android21-arm64
$ ck show env --tags=compiler
$ ck pull repo:ck-crowdtuning
$ ck info module:experiment.tune.compiler.flags.gcc
$ ck autotune program:cbench-automotive-susan --iterations=300 --repetitions=3
--scenario=experiment.tune.compiler.flags.gcc
--cmd_key=corners --record_uoa=tmp-susan-corners-gcc4-300-rnd
$ ck plot graph:tmp-susan-corners-gcc4-300-rnd
Figure 12
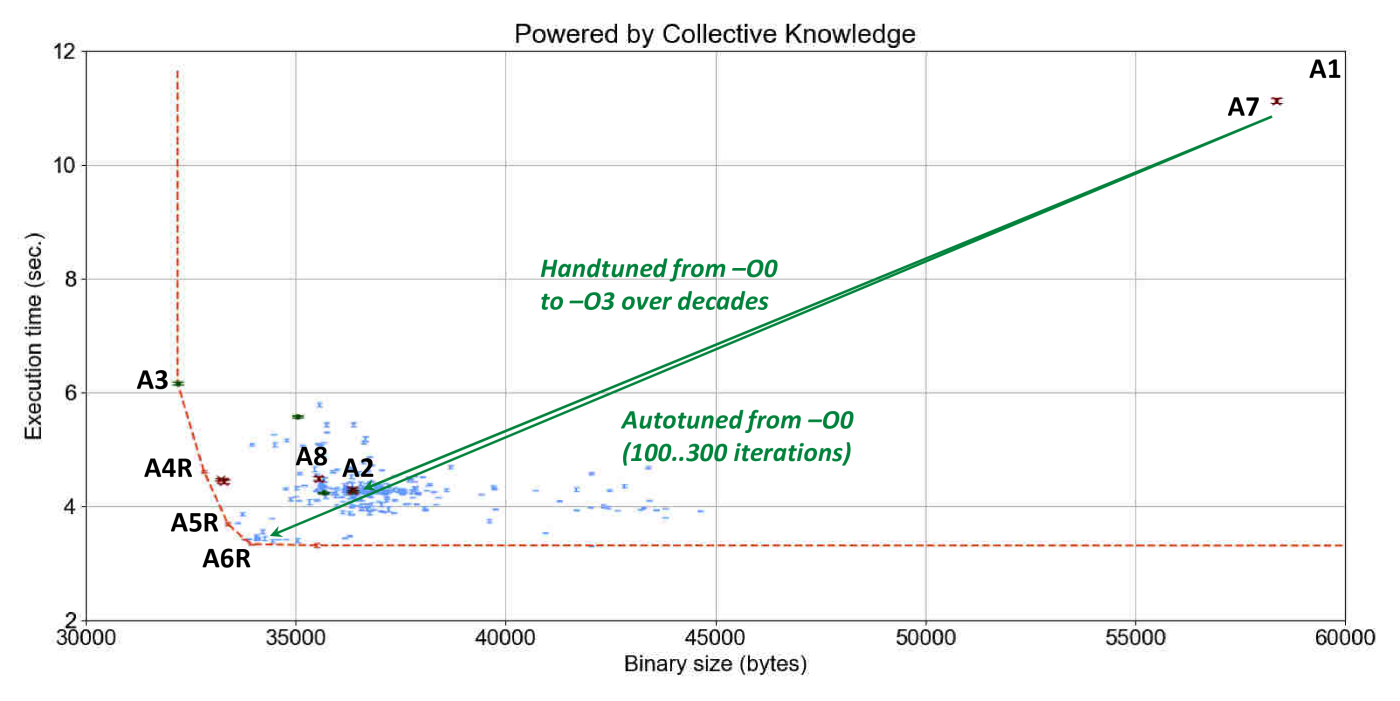
ID
Compiler
Time (sec.)
Size (bytes)
Flags
A1
GCC 4.9.2
11.7 ± 0.0
60560
A2
GCC 4.9.2
4.3 ± 0.1
36360
-O3
A3
GCC 4.9.2
6.2 ± 0.1
32184
-Os
A4R
GCC 4.9.2
4.2 ± 0.0
32448
-O3 -fno-guess-branch-probability -fno-if-conversion -fno-ivopts -fno-schedule-insns -fsingle-precision-constant --param max-unswitch-insns=5
A5R
GCC 4.9.2
3.7 ± 0.1
33376
-O3 -fbranch-probabilities -fno-ivopts -fno-sched-dep-count-heuristic
A6R
GCC 4.9.2
3.4 ± 0.0
33804
-O3 -fno-inline-small-functions -fno-ivopts -fno-tree-partial-pre
A7
CLANG 3.8.1
11.1 ± 0.1
58368
A8
CLANG 3.8.1
4.5 ± 0.1
35552
-O3
Results of GCC 4.9.2 random compiler flag autotuning of susan corners program on Raspberry Pi 3 (Model B)
device using CK with a highlighted frontier (trading-off execution time and code size)
and best found combinations of flags on this frontier.
$ ck browse experiment:tmp-susan-corners-gcc4-300-rnd
$ ck replay experiment:7b41a4ac1b3b4f2b --point=00e81f4e4abb371d
Table 1
ID
Flags
A4
-O3 -fira-algorithm=priority -fcaller-saves -fno-devirtualize-speculatively -fno-function-cse -fgcse-sm -fno-guess-branch-probability -fno-if-conversion -fno-inline-functions-called-once -fipa-reference -fno-ira-loop-pressure -fira-share-save-slots -fno-isolate-erroneous-paths-dereference -fno-ivopts -floop-nest-optimize -fmath-errno -fmove-loop-invariants -fsched-last-insn-heuristic -fsched2-use-superblocks -fno-schedule-insns -fno-signed-zeros -fsingle-precision-constant -fno-tree-sink -fno-unsafe-loop-optimizations --param asan-instrument-reads=1 --param gcse-unrestricted-cost=5 --param l1-cache-size=11 --param large-function-growth=33 --param loop-invariant-max-bbs-in-loop=636 --param max-completely-peel-loop-nest-depth=7 --param max-delay-slot-live-search=163 --param max-gcse-insertion-ratio=28 --param max-inline-insns-single=282 --param max-inline-recursive-depth-auto=0 --param max-jump-thread-duplication-stmts=6 --param max-last-value-rtl=4062 --param max-pipeline-region-insns=326 --param max-sched-region-blocks=17 --param max-tail-merge-iterations=2 --param max-unswitch-insns=5 --param max-vartrack-expr-depth=6 --param min-spec-prob=1 --param omega-eliminate-redundant-constraints=1 --param omega-max-keys=366 --param omega-max-wild-cards=36 --param sms-dfa-history=0
A4R
-O3 -fno-guess-branch-probability -fno-if-conversion -fno-ivopts -fno-schedule-insns -fsingle-precision-constant --param max-unswitch-insns=5
One of original optimization solutions found after autotuning with random selection of compiler flags (A4)
and reduced optimization solution (A4R) which results in the same or better execution time and code size.
$ck replay experiment:93974bf451f957eb --point=74e9c9f14b424ba7 --prune --prune_md5 @prune.json
$ ck replay experiment:93974bf451f957eb --point=74e9c9f14b424ba7 --prune --prune_md5 --prune_invert --prune_invert_do_not_remove_key @prune.json
Table 2
ID
Flags
A6R
-O3 -fno-inline-small-functions -fno-ivopts -fno-tree-partial-pre
A6RI
-O3 -fno-inline-small-functions -fno-ivopts -fno-tree-bit-ccp -fno-tree-partial-pre -fno-tree-pta -fno-associative-math -fno-auto-inc-dec -fno-branch-probabilities -fno-branch-target-load-optimize -fno-branch-target-load-optimize2 -fno-caller-saves -fno-check-data-deps -fno-combine-stack-adjustments -fno-conserve-stack -fno-compare-elim -fcprop-registers -fcrossjumping -fcse-follow-jumps -fno-cse-skip-blocks -fno-cx-limited-range -fno-data-sections -fdce -fno-delayed-branch -fno-devirtualize -fno-devirtualize-speculatively -fno-early-inlining -fno-ipa-sra -fno-expensive-optimizations -fno-fat-lto-objects -fno-fast-math -fno-finite-math-only -fno-float-store -fforward-propagate -fno-function-sections -fno-gcse-after-reload -fno-gcse-las -fno-gcse-lm -fno-graphite-identity -fno-gcse-sm -fno-hoist-adjacent-loads -fno-if-conversion -fif-conversion2 -fno-indirect-inlining -fno-inline-functions -fno-inline-functions-called-once -fno-ipa-cp -fno-ipa-cp-clone -fno-ipa-pta -fipa-pure-const -fno-ipa-reference -fno-ira-hoist-pressure -fno-ira-loop-pressure -fno-ira-share-save-slots -fira-share-spill-slots -fisolate-erroneous-paths-dereference -fno-isolate-erroneous-paths-attribute -fno-keep-inline-functions -fno-keep-static-consts -fno-live-range-shrinkage -fno-loop-block -fno-loop-interchange -fno-loop-strip-mine -fno-loop-nest-optimize -fno-loop-parallelize-all -fno-lto -fno-merge-all-constants -fno-merge-constants -fno-modulo-sched -fno-modulo-sched-allow-regmoves -fmove-loop-invariants -fno-branch-count-reg -fno-defer-pop -fno-function-cse -fguess-branch-probability -finline -fmath-errno -fno-peephole -fpeephole2 -fno-sched-interblock -fno-sched-spec -fno-signed-zeros -fno-toplevel-reorder -fno-trapping-math -fno-zero-initialized-in-bss -fomit-frame-pointer -fno-optimize-sibling-calls -fno-partial-inlining -fno-peel-loops -fno-predictive-commoning -fno-prefetch-loop-arrays -fno-ree -fno-rename-registers -freorder-blocks -fno-reorder-blocks-and-partition -fno-rerun-cse-after-loop -fno-reschedule-modulo-scheduled-loops -fno-rounding-math -fno-sched2-use-superblocks -fsched-pressure -fno-sched-spec-load -fno-sched-spec-load-dangerous -fno-sched-group-heuristic -fsched-critical-path-heuristic -fno-sched-spec-insn-heuristic -fno-sched-rank-heuristic -fno-sched-dep-count-heuristic -fschedule-insns -fschedule-insns2 -fno-section-anchors -fno-selective-scheduling -fno-selective-scheduling2 -fno-sel-sched-pipelining -fno-sel-sched-pipelining-outer-loops -fno-shrink-wrap -fno-signaling-nans -fno-single-precision-constant -fno-split-ivs-in-unroller -fno-split-wide-types -fno-strict-aliasing -fstrict-overflow -fno-tracer -fno-tree-builtin-call-dce -fno-tree-ccp -ftree-ch -fno-tree-coalesce-vars -fno-tree-copy-prop -ftree-copyrename -ftree-dce -ftree-dominator-opts -fno-tree-dse -ftree-forwprop -fno-tree-fre -fno-tree-loop-if-convert -fno-tree-loop-if-convert-stores -ftree-loop-im -fno-tree-phiprop -fno-tree-loop-distribution -fno-tree-loop-distribute-patterns -fno-tree-loop-linear -ftree-loop-optimize -fno-tree-loop-vectorize -fno-tree-pre -ftree-reassoc -fno-tree-sink -ftree-slsr -ftree-sra -fno-tree-switch-conversion -fno-tree-tail-merge -ftree-ter -fno-tree-vectorize -ftree-vrp -fno-unit-at-a-time -fno-unroll-all-loops -fno-unroll-loops -fno-unsafe-loop-optimizations -fno-unsafe-math-optimizations -fno-unswitch-loops -fno-variable-expansion-in-unroller -fno-vect-cost-model -fno-vpt -fno-web -fno-whole-program -fno-wpa -fexcess-precision=standard -ffp-contract=off -fira-algorithm=CB -fira-region=all
Explicitly switching off all compiler flags one by one if they do not influence the optimization result -
useful to understand all compiler optimizations which contributed to the found solution.
$ ck pull repo:ck-dev-compilers
$ ck install package:compiler-gcc-any-src-linux-no-deps --env.PARALLEL_BUILDS=1 --env.GCC_COMPILE_CFLAGS=-O0 --env.GCC_COMPILE_CXXFLAGS=-O0 --env.EXTRA_CFG_GCC=--disable-bootstrap --env.RPI3=YES --force_version=7.1.0
$ ck show env --tags=gcc
$ ck autotune program:cbench-automotive-susan --iterations=300 --repetitions=3
--scenario=experiment.tune.compiler.flags.gcc
--cmd_key=corners --record_uoa=tmp-susan-corners-gcc7-300-rnd
Figure 15
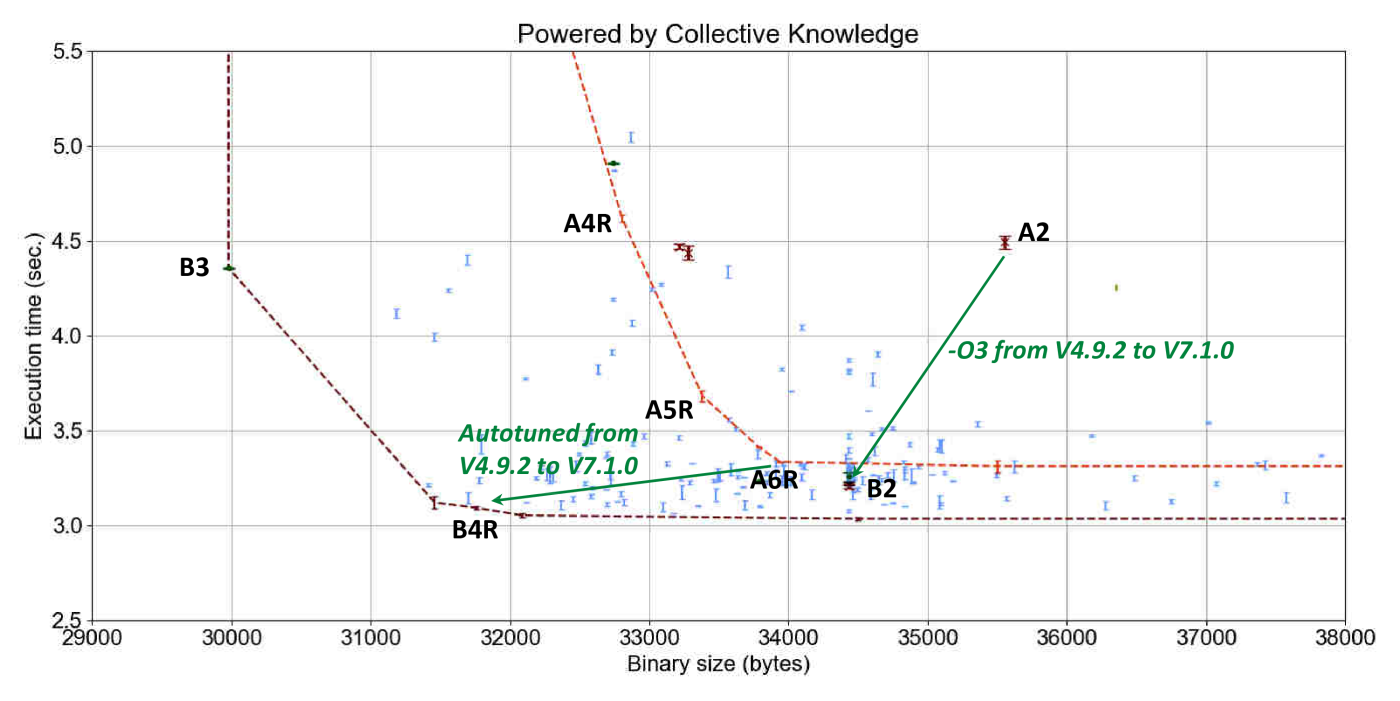
ID
Compiler
Time (sec.)
Size (bytes)
Flags
A2
GCC 4.9.2
4.3 ± 0.1
36360
-O3
A5R
GCC 4.9.2
3.7 ± 0.1
33376
-O3 -fbranch-probabilities -fno-ivopts -fno-sched-dep-count-heuristic
A6R
GCC 4.9.2
3.4 ± 0.0
33804
-O3 -fno-inline-small-functions -fno-ivopts -fno-tree-partial-pre
B1
GCC 7.1.0
11.5 ± 0.0
58008
B2
GCC 7.1.0
3.2 ± 0.0
34432
-O3
B3
GCC 7.1.0
4.4 ± 0.0
29980
-Os
B4
GCC 7.1.0
3.1 ± 0.1
31460
-O3 -fno-cx-fortran-rules -fno-devirtualize -fno-expensive-optimizations -fno-if-conversion -fira-share-save-slots -fno-ira-share-spill-slots -fno-ivopts -fno-loop-strip-mine -finline -fno-math-errno -frounding-math -fno-sched-rank-heuristic -fno-sel-sched-pipelining-outer-loops -fno-semantic-interposition -fsplit-wide-types -fno-tree-ccp -ftree-dse
B4R
GCC 7.1.0
3.1 ± 0.1
31420
-O3 -fno-expensive-optimizations -fno-ivopts -fno-math-errno
Results of GCC 7.1.0 random compiler flag autotuning of susan corners program on Raspberry Pi 3 (Model B)
device using CK with a highlighted frontier (trading-off execution time and code size),
best combinations of flags on this frontier, and comparison with the results from GCC 4.9.2.
$ ck pull repo:ck-rpi-optimization-results
$ ck find script:rpi3-susan*
5 Crowdsourcing autotuning
We use our universal CK autotuning workflow to teach students and end-users
how to automatically find good trade offs between multiple characteristics
for any individual program, data set, compiler, environment and hardware.
At the same time, automatically tuning many realistic workloads
is very costly and can easily take from days to weeks and months [24].
$ ck load repo:remote-ck --min
$ ck list remote-ck:experiment:* | sort
$ ck crowdtune program --iterations=50 --scenario=8289e0cf24346aa7
$ ck crowdsource program.optimization --iterations=50 --scenario=8289e0cf24346aa7
Figure 17
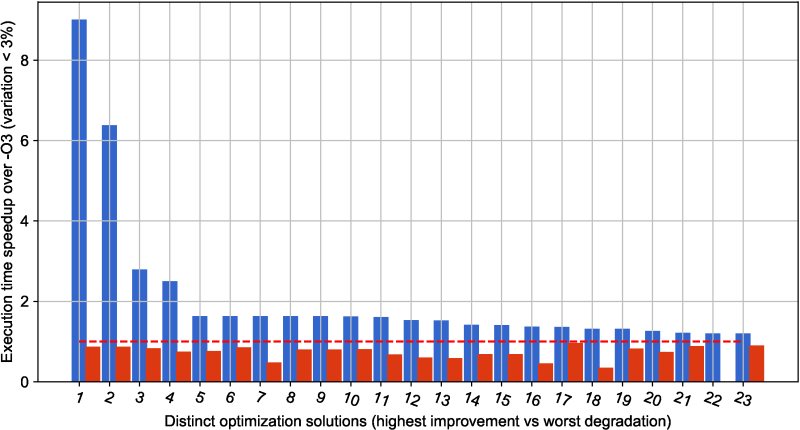
Solution
Pruned flags (complexity reduction)
Best species
Worst species
1
-O3 -flto
6
3
2
-O3 -fno-inline -flto
1
1
3
-O3 -fno-if-conversion2 -funroll-loops
2
1
4
-O3 -fpeel-loops -ftracer
1
3
5
-O3 -floop-nest-optimize -fno-sched-interblock -fno-tree-copy-prop -funroll-all-loops
4
1
6
-O3 -funroll-loops
2
3
7
-O3 -floop-strip-mine -funroll-loops
1
1
8
-O3 -fno-inline -fno-merge-all-constants -fno-tree-ccp -funroll-all-loops
2
3
9
-O3 -fno-tree-loop-if-convert -funroll-all-loops
3
2
10
-O3 -fno-section-anchors -fselective-scheduling2 -fno-tree-forwprop -funroll-all-loops
2
2
11
-O3 -fno-ivopts -funroll-loops
4
1
12
-O3 -fno-tree-ch -funroll-all-loops
1
1
13
-O3 -fno-move-loop-invariants -fno-tree-ch -funroll-loops
1
2
14
-O3 -fira-algorithm=priority -fno-ivopts
1
2
15
-O3 -fno-ivopts
2
4
16
-O3 -fno-sched-spec -fno-tree-ch
1
2
17
-O3 -fno-ivopts -fselective-scheduling -fwhole-program
1
1
18
-O3 -fno-omit-frame-pointer -fno-tree-loop-optimize
1
4
19
-O3 -fno-auto-inc-dec -ffinite-math-only
1
2
20
-O3 -fno-guess-branch-probability -fira-loop-pressure -fno-toplevel-reorder
1
5
21
-O3 -fselective-scheduling2 -fno-tree-pre
2
2
22
-O3 -fgcse-sm -fno-move-loop-invariants -fno-tree-forwprop -funroll-all-loops -fno-web
1
0
23
-O3 -fno-schedule-insns -fselective-scheduling2
1
2
[ Latest live results in online repository and replay info ]
Snapshot of top performing combinations of GCC 4.9.2 compiler flags together with highest speedups and worst degradations achieved across all shared CK workloads on RPi3.
Figure 18
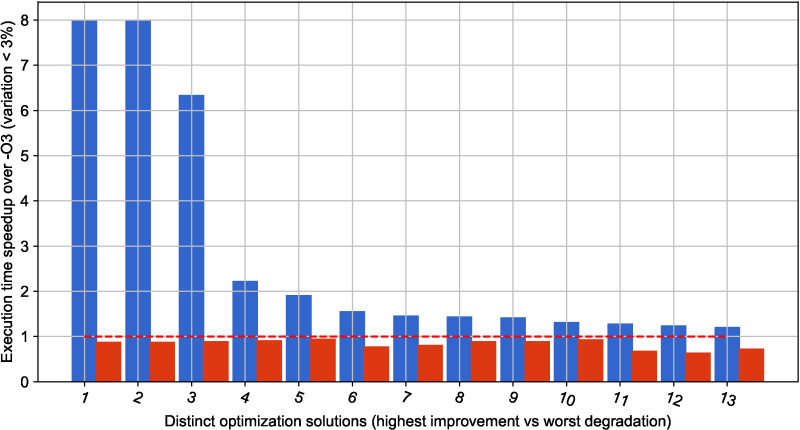
Solution
Pruned flags (complexity reduction)
Best species
Worst species
1
-O3 -fno-delayed-branch -flto -fno-selective-scheduling2 -fno-whole-program
6
0
2
-O3 -flto
4
1
3
-O3 -fno-inline -flto
2
1
4
-O3 -fno-cprop-registers -flto -funroll-all-loops
3
1
5
-O3 -fno-tree-fre -funroll-all-loops
2
1
6
-O3 -fno-predictive-commoning -fno-schedule-insns -funroll-loops
3
3
7
-O3 -funroll-loops
3
0
8
-O3 -fno-tree-ter -funroll-all-loops
3
1
9
-O3 -fno-merge-all-constants -fselective-scheduling2 -funroll-loops
1
0
10
-O3 -fno-devirtualize-at-ltrans -fno-predictive-commoning -fno-tree-pre
1
2
11
-O3 -fcheck-data-deps -fira-loop-pressure -fno-isolate-erroneous-paths-dereference -fno-sched-dep-count-heuristic -fsection-anchors -fsemantic-interposition -fno-tree-ch -fno-tree-loop-linear -fno-tree-partial-pre
2
2
12
-O3 -fno-schedule-insns -ftracer
2
3
13
-O3 -fno-auto-inc-dec -fguess-branch-probability -fipa-pure-const -freorder-blocks -fselective-scheduling2 -ftree-ccp -fno-tree-pre -ftree-tail-merge
1
1
[ Latest live results in online repository and replay info ]
Snapshot of top performing combinations of GCC 7.1.0 compiler flags together with highest speedups and worst degradations achieved across all shared CK workloads on RPi3.
$ ck benchmark program:{new program}
--shared_solution_cid=27bc42ee449e880e:
79bca2b76876b5c6-8289e0cf24346aa7-
f49649288ab0accd
$ ck benchmark program:{new program}
-O27bc42ee449e880e:79bca2b76876b5c6-
8289e0cf24346aa7-f49649288ab0accd
6 Autotuning and crowd-tuning real workloads
In this section we would like to show how we can apply universal autotuning
and collaboratively found optimization solutions to several popular workloads
used by RPi community: zlib decode, zlib encode,
7z encode, aubio, ccrypt, gzip decode, gzip encode, minigzip decode,
minigzip encode, rhash, sha512sum, unrar.
We added the latest versions of these real programs
to the CK describing how to compile and run them
using CK JSON meta data:
$ ck ls ck-rpi-optimization:program:*
$ ck autotune program:zlib --cmd_key=decode
--iterations=150 --repetitions=3
--scenario=experiment.tune.compiler.flags.gcc
--parametric_flags --cpu_flags --base_flags
--record_uoa=tmp-rpi3-zlib-decode-gcc4-150bpc-rnd
Figure 19
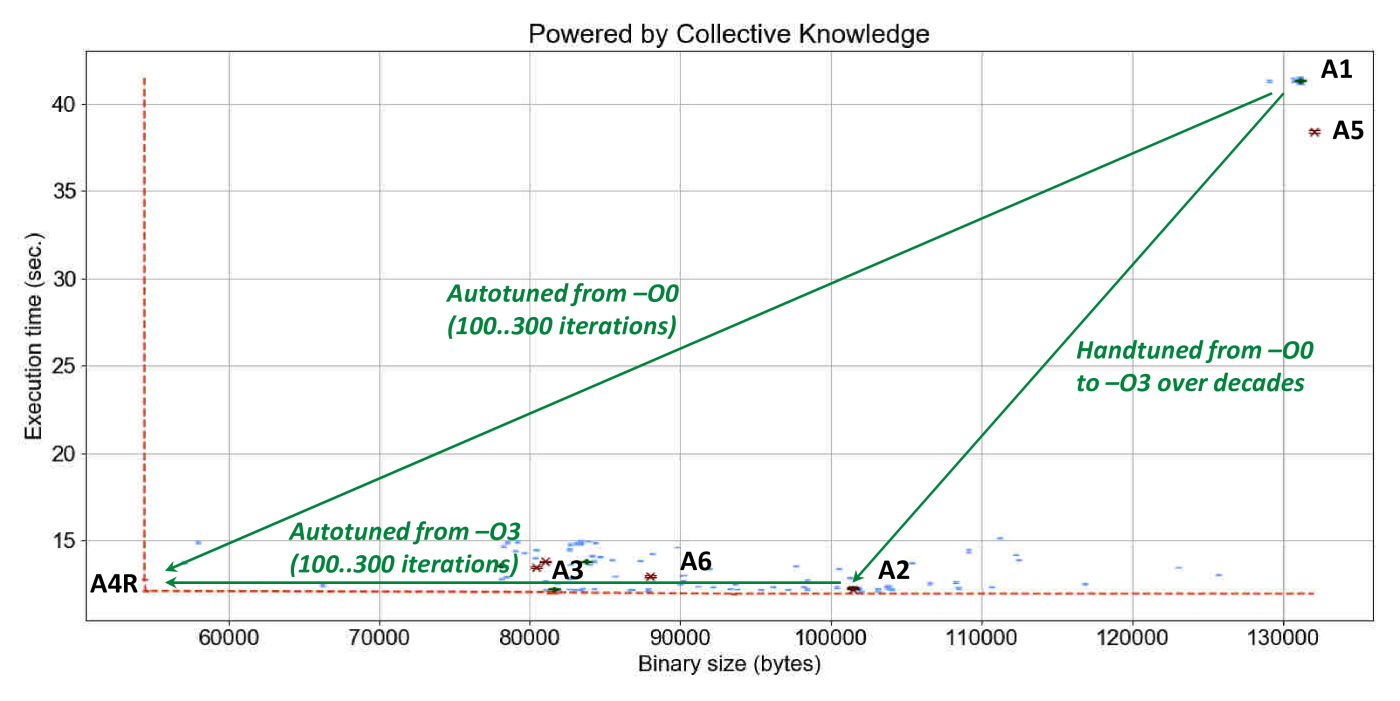
ID
Compiler
Time (sec.)
Size (bytes)
Flags
A1
GCC 4.9.2
41.3 ± 0.0
131140
A2
GCC 4.9.2
12.2 ± 0.0
101448
-O3
A3
GCC 4.9.2
13.6 ± 0.0
78116
-Os
A4R
GCC 4.9.2
12.1 ± 0.1
54272
-O2 -flto -fno-tree-fre
A5
CLANG 3.8.1
38.5 ± 0.0
132080
A6
CLANG 3.8.1
12.9 ± 0.1
90076
-O3
Results of GCC 4.9.2 random compiler flag autotuning of a zlib decode workload on RPi3
device using CK with a highlighted frontier (trading-off execution time and code size)
and the best found combinations of flags on this frontier.
Figure 20
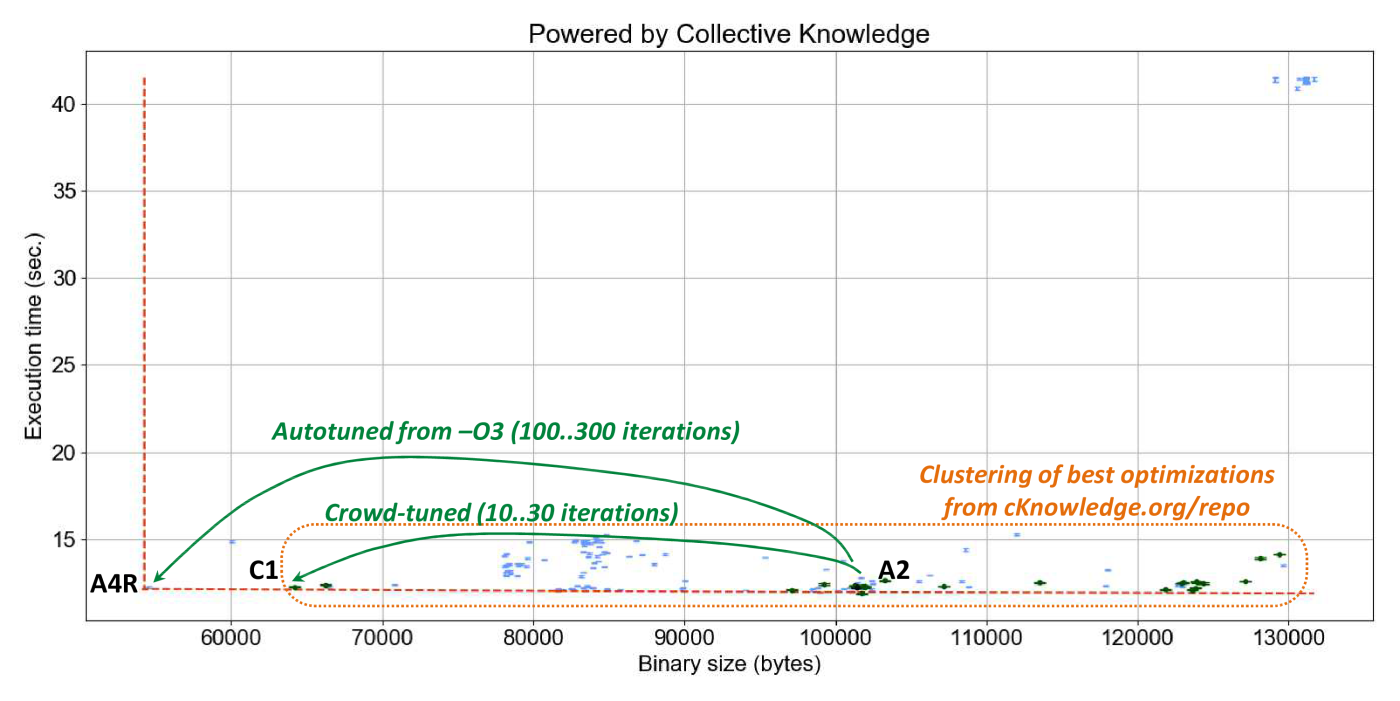
ID
Compiler
Time (sec.)
Size (bytes)
Flags
A2
GCC 4.9.2
12.2 ± 0.0
101448
-O3
A4R
GCC 4.9.2
12.1 ± 0.1
54272
-O2 -flto -fno-tree-fre
C1
GCC 4.9.2
12.2 ± 0.1
64184
-O3 -fno-inline -flto
Speeding up GCC 4.9.2 autotuning of a zlib decode workload on RPi3 device using
10..20 best performing combinations of compiler flags already found and shared by the community
during crowd-tuning.
Figure 21
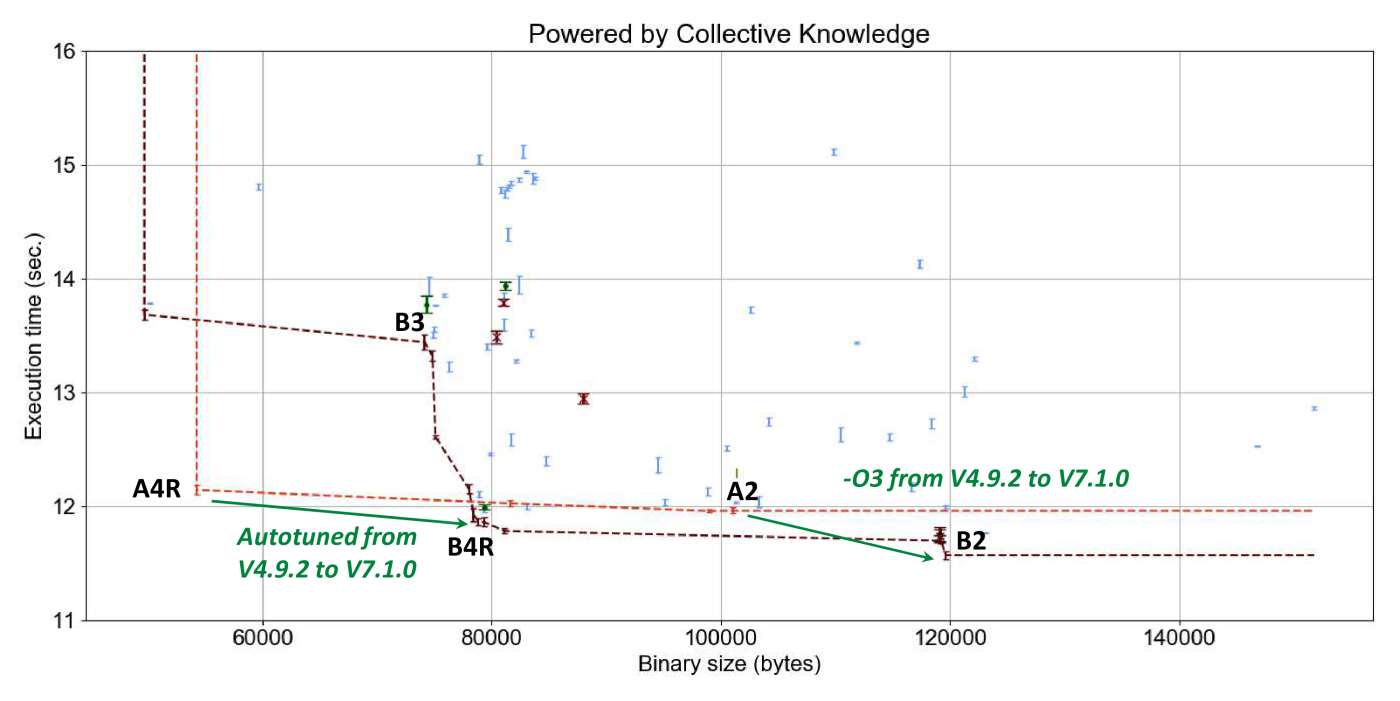
ID
Compiler
Time (sec.)
Size (bytes)
Flags
A2
GCC 4.9.2
12.2 ± 0.0
101448
-O3
A4R
GCC 4.9.2
12.1 ± 0.1
54272
-O2 -flto -fno-tree-fre
B1
GCC 7.1.0
41.3 ± 0.0
128376
B2
GCC 7.1.0
11.7 ± 0.1
119084
-O3
B3
GCC 7.1.0
13.7 ± 0.1
74280
-Os
B4R
GCC 7.1.0
11.9 ± 0.1
78700
-O2 -fno-early-inlining -fno-tree-fre
Results of GCC 7.1.0 random compiler flag autotuning of zlib decode on RPi3 device
with a highlighted frontier (trading-off execution time and code size),
the best combinations of flags on this frontier, and comparison with the results from GCC 4.9.2.
Figure 22
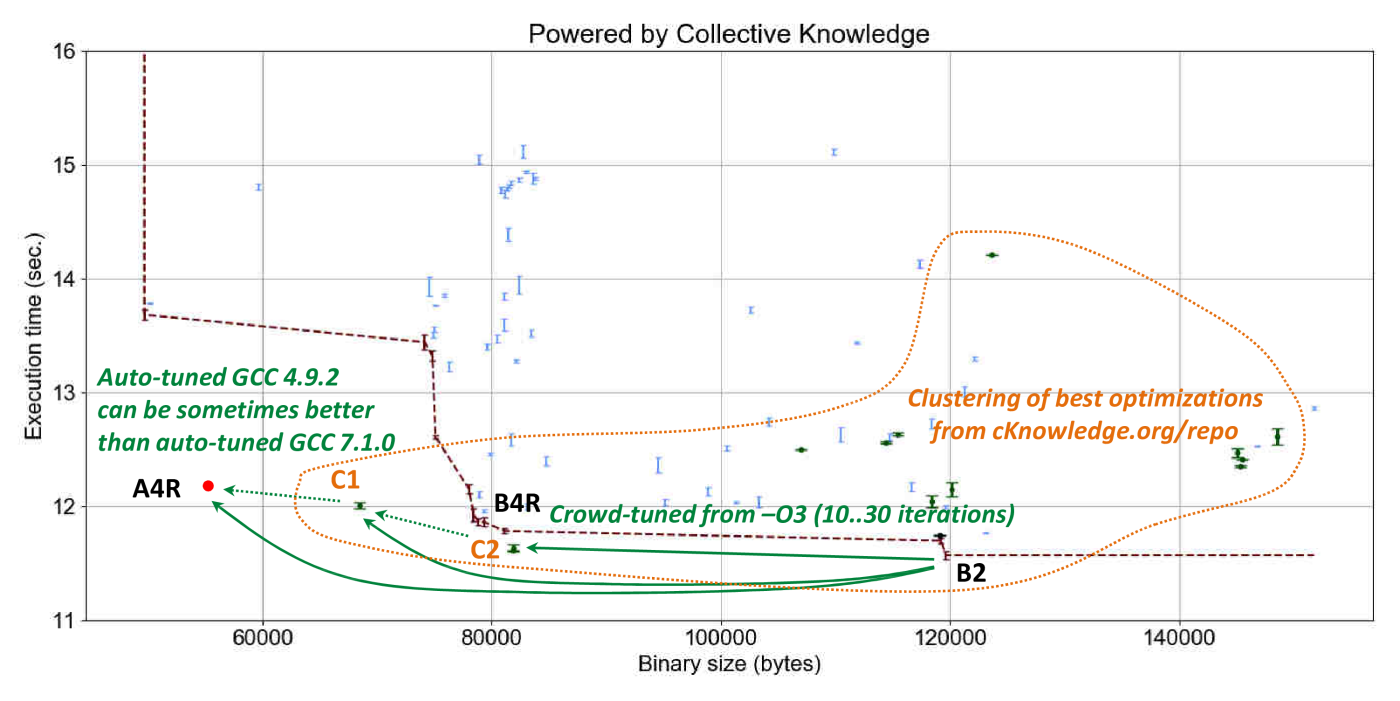
ID
Compiler
Time (sec.)
Size (bytes)
Flags
A4R
GCC 4.9.2
12.1 ± 0.1
54272
-O2 -flto -fno-tree-fre
B2
GCC 7.1.0
11.7 ± 0.1
119084
-O3
B4R
GCC 7.1.0
11.9 ± 0.1
78700
-O2 -fno-early-inlining -fno-tree-fre
C1
GCC 7.1.0
12.0 ± 0.0
68464
-O3 -fno-inline -flto
C2
GCC 7.1.0
11.6 ± 0.1
81880
-O3 -flto
Testing reactions of zlib decode to top most efficient GCC 7.1.0 optimizations shared by the community for RPi3 devices vs GCC 4.9.2.
Figure 23
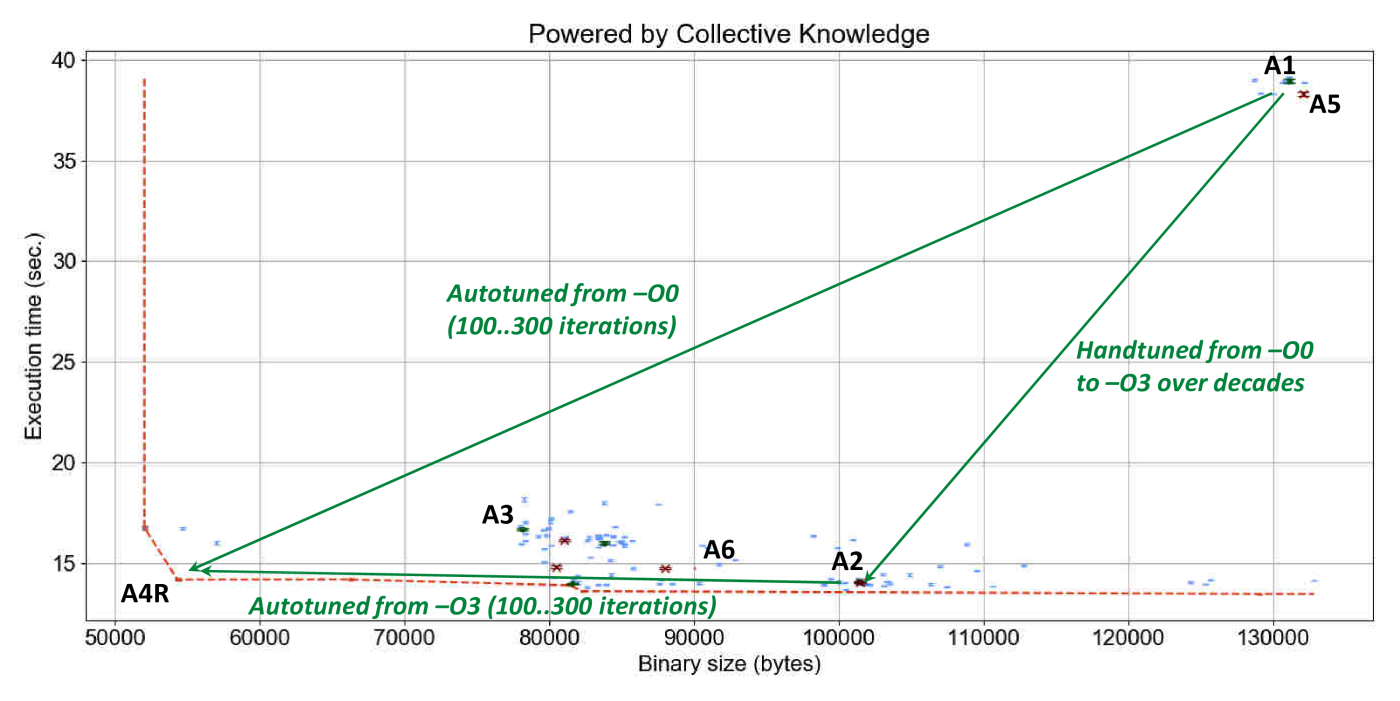
ID
Compiler
Time (sec.)
Size (bytes)
Flags
A1
GCC 4.9.2
39.0 ± 0.1
131140
A2
GCC 4.9.2
14.0 ± 0.1
101448
-O3
A3
GCC 4.9.2
16.7 ± 0.1
78116
-Os
A4R
GCC 4.9.2
14.2 ± 0.1
54284
-O2 -flto
A5
CLANG 3.8.1
38.2 ± 0.1
132080
A6
CLANG 3.8.1
14.7 ± 0.1
90076
-O3
Results of GCC 4.9.2 random compiler flag autotuning of a zlib encode workload on RPi3
device using CK with a highlighted frontier (trading-off execution time and code size)
and the best found combinations of flags on this frontier.
Figure 24
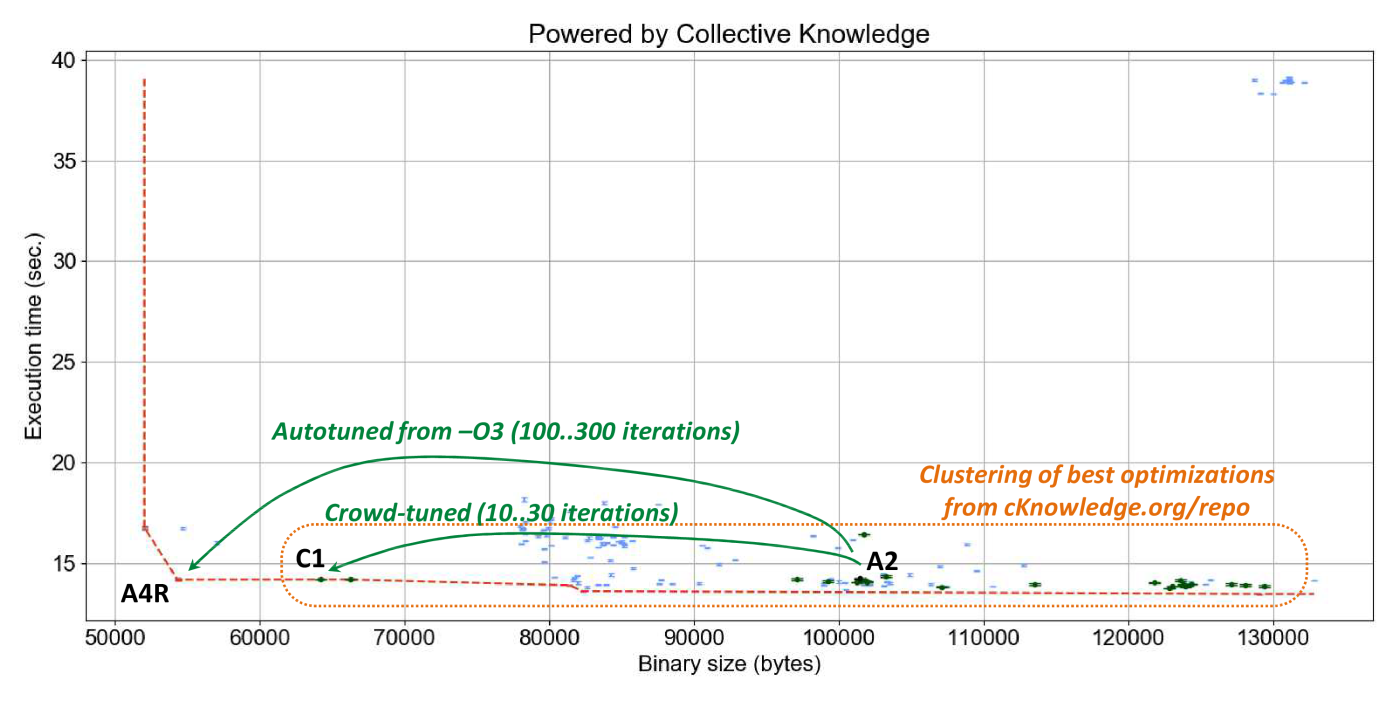
ID
Compiler
Time (sec.)
Size (bytes)
Flags
A2
GCC 4.9.2
14.0 ± 0.1
101448
-O3
A4R
GCC 4.9.2
14.2 ± 0.1
54284
-O2 -flto
C1
GCC 4.9.2
14.2 ± 0.0
64184
-O3 -fno-inline -flto
Accelerating GCC 4.9.2 autotuning of a zlib encode workload on RPi3 device using
10..20 best performing combinations of compiler flags already found
and shared by the community during collaborative optimization.
Figure 25
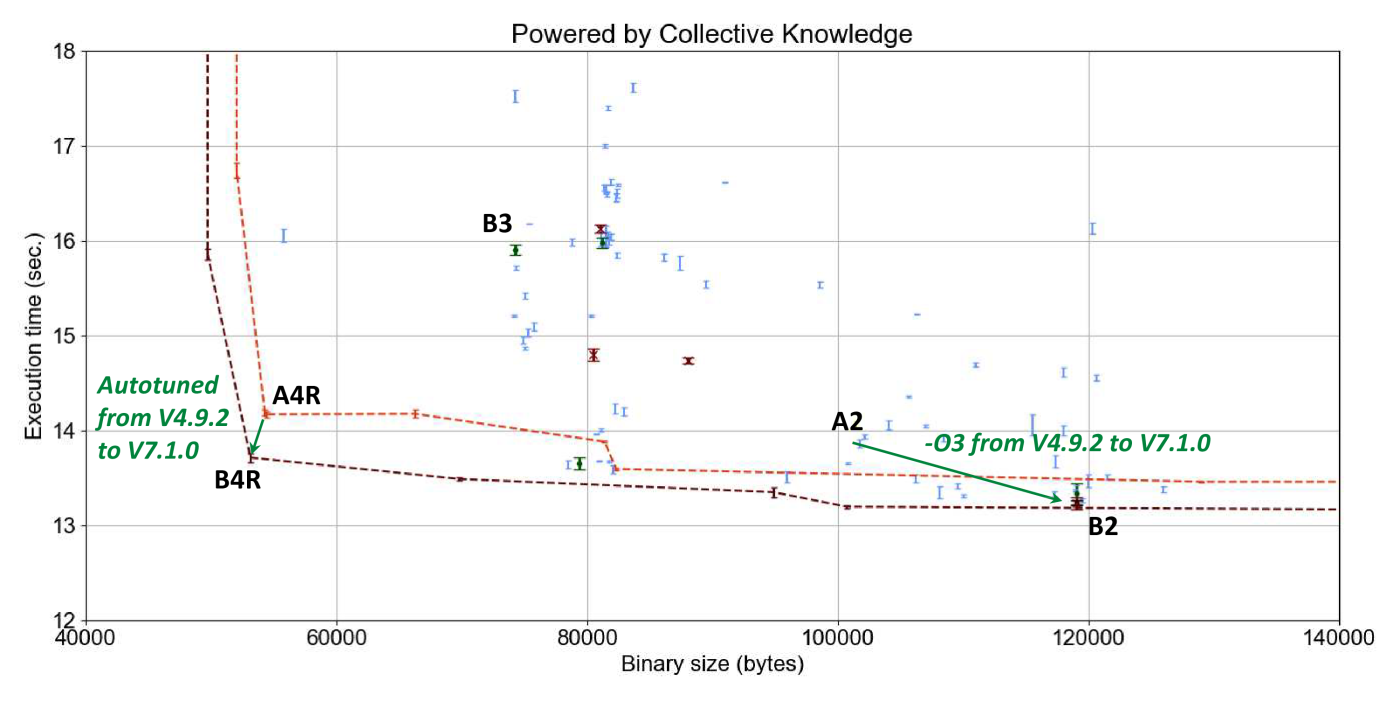
ID
Compiler
Time (sec.)
Size (bytes)
Flags
A2
GCC 4.9.2
14.0 ± 0.1
101448
-O3
A4R
GCC 4.9.2
14.2 ± 0.1
54284
-O2 -flto
B1
GCC 7.1.0
38.8 ± 0.0
128376
B2
GCC 7.1.0
13.2 ± 0.1
119084
-O3
B3
GCC 7.1.0
15.9 ± 0.1
74280
-Os
B4R
GCC 7.1.0
13.7 ± 0.0
52424
-O2 -fgcse-after-reload -flto -fschedule-fusion -fno-ssa-phiopt -fno-tree-fre
Results of GCC 7.1.0 random compiler flag autotuning of zlib encode on RPi3 device
with a highlighted frontier (trading-off execution time and code size),
the best combinations of flags on this frontier, and comparison with the results from GCC 4.9.2.
Figure 26
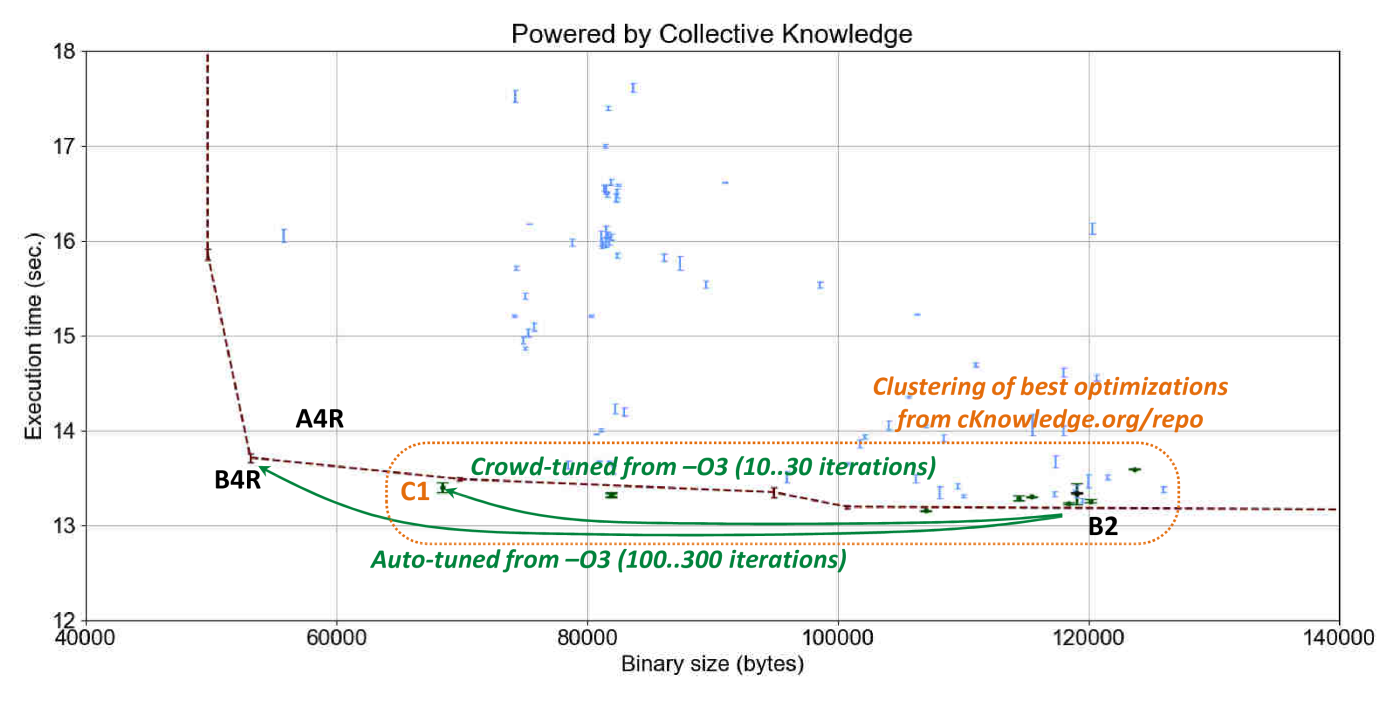
ID
Compiler
Time (sec.)
Size (bytes)
Flags
A4R
GCC 4.9.2
14.2 ± 0.1
54284
-O2 -flto
B2
GCC 7.1.0
13.2 ± 0.1
119084
-O3
B4R
GCC 7.1.0
13.7 ± 0.0
52424
-O2 -fgcse-after-reload -flto -fschedule-fusion -fno-ssa-phiopt -fno-tree-fre
C1
GCC 4.9.2
13.3 ± 0.1
68464
-O3 -fno-inline -flto
Analyzing reactions of zlib encode to top most efficient GCC 7.1.0 optimizations shared by the community for RPi3 devices vs GCC 4.9.2.
Table 3
Workload
Compiler
Time improvement over -O3 (-O3 time in brackets)
Binary size improvement over -O3 (-O3 size in brackets)
Flags
7z encode
GCC 4.9.2
1.02 (5.5 ± 0.1)
1.52 (859728)
-O3 -fno-inline -flto
7z encode
GCC 7.1.0
no (6.0 ± 1.0)
no (887464)
-O3
ccrypt encrypt
GCC 4.9.2
no (7.0 ± 2.0)
no (61772)
-O3
ccrypt encrypt
GCC 7.1.0
1.16 (7.6 ± 0.1)
1.00 (59996)
-O3 -fno-auto-inc-dec -fguess-branch-probability -fipa-pure-const -freorder-blocks -fselective-scheduling2 -ftree-ccp -fno-tree-pre -ftree-tail-merge
gzip decode
GCC 4.9.2
1.04 (4.2 ± 0.0)
1.12 (85956)
-O3 -fno-inline -flto
gzip decode
GCC 7.1.0
1.04 (4.2 ± 0.0)
1.18 (90568)
-O3 -fno-inline -flto
gzip decode
GCC 7.1.0
1.08 (4.2 ± 0.0)
0.81 (90568)
-O3 -fno-cprop-registers -flto -funroll-all-loops
gzip encode
GCC 4.9.2
0.98 (12.3 ± 0.1)
1.10 (85956)
-O3 -fno-omit-frame-pointer -fno-tree-loop-optimize
gzip encode
GCC 7.1.0
1.01 (12.3 ± 0.8)
1.18 (90568)
-O3 -fno-inline -flto
minigzip decode
GCC 4.9.2
1.24 (10.0 ± 4.0)
1.60 (101432)
-O3 -fno-inline -flto
minigzip decode
GCC 4.9.2
1.32 (10.0 ± 4.0)
1.00 (101432)
-O3 -fselective-scheduling2 -fno-tree-pre
minigzip decode
GCC 7.1.0
1.14 (8.0 ± 3.0)
1.76 (119088)
-O3 -fno-inline -flto
minigzip encode
GCC 4.9.2
0.89 (9.9 ± 0.0)
1.60 (101432)
-O3 -fno-inline -flto
minigzip encode
GCC 7.1.0
1.00 (9.6 ± 0.0)
1.76 (119088)
-O3 -fno-inline -flto
rhash sha3
GCC 4.9.2
1.00 (4.8 ± 0.0)
1.12 (14848)
-O3 -flto
rhash sha3
GCC 7.1.0
1.35 (5.2 ± 0.0)
1.30 (16396)
-O3 -fno-inline -flto
rhash sha3
GCC 7.1.0
1.48 (5.2 ± 0.0)
1.07 (16396)
-O3 -fno-schedule-insns -ftracer
sha512sum sha512
GCC 4.9.2
1.12 (7.8 ± 0.0)
1.06 (125372)
-O3 -fno-schedule-insns -fselective-scheduling2
sha512sum sha512
GCC 7.1.0
1.22 (7.3 ± 0.0)
1.07 (121180)
-O3 -fno-predictive-commoning -fno-schedule-insns -funroll-loops
unrar
GCC 4.9.2
0.97 (18.0 ± 4.0)
1.38 (326572)
-O3 -fno-inline -flto
unrar
GCC 4.9.2
1.13 (18.0 ± 4.0)
0.80 (326572)
-O3 -fno-section-anchors -fselective-scheduling2 -fno-tree-forwprop -funroll-all-loops
unrar
GCC 7.1.0
0.96 (18.0 ± 6.0)
1.38 (326572)
-O3 -fno-inline -flto
unrar
GCC 7.1.0
1.07 (18.0 ± 6.0)
0.78 (326572)
-O3 -fno-tree-ter -funroll-all-loops
The highest found improvements (degradations) in execution time and binary size
for several important RPi3 programs
as reactions to top most efficient shared optimizations
for GCC 4.9.2 and GCC 7.1.0.
$ ck find script:rpi3-zlib-decode*
$ ck find script:rpi3-zlib-encode*
$ ck find script:rpi3-all-autotune
7 Crowd-fuzzing compilers
When distributing compiler autotuning and learning across diverse environments,
compilers and devices [5, 6]
we noticed that about 10..15% of randomly generated combinations
of flags can crash a compiler or produce wrong code with segmentation faults
or incorrect output.
Indeed our approach stresses various unexpected combinations
of compiler optimizations across diverse and possibly untested platforms and workloads
thus helping automatically detect software and hardware bugs.
It complements well-known fuzzing techniques for automatic software
testing [78, 79, 80].
$ ck autotune program:cbench-automotive-susan --iterations=150 --repetitions=3
--scenario=experiment.tune.compiler.flags.gcc.fuzz
--cmd_key=corners --record_uoa=tmp-susan-corners-gcc7-150-rnd-fuzz
$ ck browser experiment:tmp-susan-corners-gcc7-150-rnd-fuzz
$ ck replay experiment:tmp-susan-corners-gcc7-150-rnd-fuzz
$ ck search experiment:rpi3-*fuzz*
It is also possible to browse them online.
$ ck find script:rpi3-susan-fuzz-bugs
8 Unifying and crowdsourcing machine learning
Having all optimization statistics continuously aggregated in a repository
in a common format with JSON meta description
makes it relatively straightforward to apply various machine learning
and predictive analytics techniques including
decision trees, nearest neighbor classifiers, support vector machines (SVM)
and deep learning [86, 87].
These techniques can help automate detection of regularities and consistent patterns in program behavior,
build models, and predict efficient optimizations rather than
continuously re-optimizing each new program as we previously demonstrated
in the MILEPOST project [24, 88].
Furthermore, we can now teach students how to collaboratively model
the behavior of all computer systems, speed up optimization space exploration,
and improve predictions of the most efficient software and hardware optimizations
based on various program, data set, platform and run-time
features [4, 6].
Table 4
Model
Features
Accuracy (GCC 4.9.2)
Accuracy (GCC 7.1.0)
milepost nn
ft1 .. ft56
0.37
0.30
Accuracy of the nearest neighbor classifier with MILEPOST features
to predict the most efficient combinations of compiler flags
for GCC 4.9.2 and GCC 7.1.0 flags on RPi3 device.
$ ck find script:rpi3-crowdmodel
9 Improving and autotuning models and features
There are many publications demonstrating interesting machine learning algorithms,
features and models to predict efficient program optimizations and hardware
designs [90, 62, 91, 92, 93, 94, 88, 95, 66, 70, 96, 97, 98, 99].
Though all these techniques can be potentially useful, the
lack of common interfaces and meta information for artifacts
and experimental workflows makes it extremely challenging
to compare, reuse and build upon them particularly
in industrial projects with tough deadlines.
●
Table 5
Model
Features
Accuracy (GCC 4.9.2)
Accuracy (GCC 7.1.0)
decision trees with cross validation; depth 1
ft1 .. ft65
0.26
0.33
decision trees with cross validation; depth 2
ft1 .. ft65
0.26
0.36
decision trees with cross validation; depth 3
ft1 .. ft65
0.27
0.35
decision trees with cross validation; depth 4
ft1 .. ft65
0.27
0.39
decision trees with cross validation; depth 5
ft1 .. ft65
0.25
0.34
decision trees with cross validation; depth 6
ft1 .. ft65
0.33
0.34
decision trees with cross validation; depth 7
ft1 .. ft65
0.36
0.32
decision trees with cross validation; depth 8
ft1 .. ft65
0.40
0.36
decision trees with cross validation; depth 9
ft1 .. ft65
0.38
0.31
decision trees with cross validation; depth 10
ft1 .. ft65
0.37
0.30
decision trees with cross validation; depth 11
ft1 .. ft65
0.34
0.33
decision trees with cross validation; depth 12
ft1 .. ft65
0.36
0.32
decision trees with cross validation; depth 13
ft1 .. ft65
0.35
0.34
decision trees with cross validation; depth 14
ft1 .. ft65
0.36
0.34
decision trees with cross validation; depth 15
ft1 .. ft65
0.34
0.34
decision trees with cross validation; depth 16
ft1 .. ft65
0.36
0.35
decision trees with cross validation; depth 17
ft1 .. ft65
0.34
0.36
decision trees with cross validation; depth 18
ft1 .. ft65
0.36
0.34
decision trees with cross validation; depth 19
ft1 .. ft65
0.35
0.34
decision trees with cross validation; depth 20
ft1 .. ft65
0.37
0.33
decision trees with cross validation; depth 21
ft1 .. ft65
0.36
0.36
decision trees with cross validation; depth 22
ft1 .. ft65
0.37
0.34
decision trees with cross validation; depth 23
ft1 .. ft65
0.36
0.35
decision trees with cross validation; depth 24
ft1 .. ft65
0.36
0.33
decision trees with cross validation; depth 25
ft1 .. ft65
0.37
0.37
decision trees with cross validation; depth 26
ft1 .. ft65
0.37
0.33
decision trees with cross validation; depth 27
ft1 .. ft65
0.37
0.36
decision trees with cross validation; depth 28
ft1 .. ft65
0.34
0.34
decision trees with cross validation; depth 29
ft1 .. ft65
0.35
0.37
decision trees without cross validation; depth 1
ft1 .. ft65
0.39
0.36
decision trees without cross validation; depth 2
ft1 .. ft65
0.40
0.40
decision trees without cross validation; depth 3
ft1 .. ft65
0.46
0.41
decision trees without cross validation; depth 4
ft1 .. ft65
0.49
0.47
decision trees without cross validation; depth 5
ft1 .. ft65
0.55
0.52
decision trees without cross validation; depth 6
ft1 .. ft65
0.60
0.57
decision trees without cross validation; depth 7
ft1 .. ft65
0.65
0.61
decision trees without cross validation; depth 8
ft1 .. ft65
0.69
0.68
decision trees without cross validation; depth 9
ft1 .. ft65
0.73
0.72
decision trees without cross validation; depth 10
ft1 .. ft65
0.75
0.79
decision trees without cross validation; depth 11
ft1 .. ft65
0.79
0.83
decision trees without cross validation; depth 12
ft1 .. ft65
0.83
0.87
decision trees without cross validation; depth 13
ft1 .. ft65
0.85
0.90
decision trees without cross validation; depth 14
ft1 .. ft65
0.88
0.94
decision trees without cross validation; depth 15
ft1 .. ft65
0.91
0.95
decision trees without cross validation; depth 16
ft1 .. ft65
0.94
0.96
decision trees without cross validation; depth 17
ft1 .. ft65
0.95
0.96
decision trees without cross validation; depth 18
ft1 .. ft65
0.97
0.96
decision trees without cross validation; depth 19
ft1 .. ft65
0.97
0.96
decision trees without cross validation; depth 20
ft1 .. ft65
0.98
0.96
decision trees without cross validation; depth 21
ft1 .. ft65
0.98
0.96
decision trees without cross validation; depth 22
ft1 .. ft65
0.98
0.96
decision trees without cross validation; depth 23
ft1 .. ft65
0.98
0.96
decision trees without cross validation; depth 24
ft1 .. ft65
0.98
0.96
decision trees without cross validation; depth 25
ft1 .. ft65
0.98
0.96
decision trees without cross validation; depth 26
ft1 .. ft65
0.98
0.96
decision trees without cross validation; depth 27
ft1 .. ft65
0.98
0.96
decision trees without cross validation; depth 28
ft1 .. ft65
0.98
0.96
decision trees without cross validation; depth 29
ft1 .. ft65
0.98
0.96
dnn tf with cross validation; iteration 1
ft1 .. ft65
0.68
0.30
dnn tf with cross validation; iteration 2
ft1 .. ft65
0.64
0.33
dnn tf with cross validation; iteration 3
ft1 .. ft65
0.61
0.45
dnn tf with cross validation; iteration 4
ft1 .. ft65
0.64
0.44
dnn tf with cross validation; iteration 5
ft1 .. ft65
0.60
0.48
dnn tf with cross validation; iteration 6
ft1 .. ft65
0.58
0.30
dnn tf with cross validation; iteration 7
ft1 .. ft65
0.57
0.43
dnn tf with cross validation; iteration 8
ft1 .. ft65
0.55
0.37
dnn tf with cross validation; iteration 9
ft1 .. ft65
0.68
0.44
dnn tf without cross validation; iteration 1
ft1 .. ft65
0.72
0.29
dnn tf without cross validation; iteration 2
ft1 .. ft65
0.72
0.47
dnn tf without cross validation; iteration 3
ft1 .. ft65
0.72
0.48
dnn tf without cross validation; iteration 4
ft1 .. ft65
0.68
0.62
dnn tf without cross validation; iteration 5
ft1 .. ft65
0.70
0.48
dnn tf without cross validation; iteration 6
ft1 .. ft65
0.55
0.45
dnn tf without cross validation; iteration 7
ft1 .. ft65
0.72
0.43
dnn tf without cross validation; iteration 8
ft1 .. ft65
0.62
0.32
dnn tf without cross validation; iteration 9
ft1 .. ft65
0.72
0.53
milepost nn
ft1 .. ft121
0.30
0.30
milepost nn
ft1 .. ft56
0.37
0.30
milepost nn
ft1 .. ft65
0.30
0.30
milepost nn
ft57 .. ft121
0.30
0.30
milepost nn
ft57 .. ft65
0.30
0.30
milepost nn
ft66 .. ft121
0.36
0.32
milepost nn
ft1 .. ft121 (normalized)
0.37
0.37
milepost nn
ft1 .. ft56 (normalized)
0.37
0.33
milepost nn
ft1 .. ft65 (normalized)
0.39
0.32
milepost nn
ft57 .. ft121 (normalized)
0.37
0.39
milepost nn
ft57 .. ft65 (normalized)
0.37
0.35
milepost nn
ft66 .. ft121 (normalized)
0.38
0.38
milepost nn (reduce complexity1)
ft1 .. ft121 (normalized)
0.45
0.44
milepost nn (reduce complexity2)
ft1 .. ft121 (normalized)
0.45
0.40
Prediction accuracy when autotuning or reducing complexity of decision tree,
nearest neighbor and deep learning classifiers
across different groups of program features.
$ ck find script:rpi3-crowdmodel
10 Enabling input-aware optimization
Current prediction accuracy which we achieved for the most efficient compiler flags
is still disappointing: around 0.45% for GCC 7.1.0.
We explained this in more detail in [6, 4]
by missing features particularly available at run-time from data sets and hardware.
Having a customizable experimental workflow with pluggable artifacts
makes it relatively straightforward to analyze reactions of a given program
to the most efficient optimization across multiple data sets
and search for missing features.
$ ck add repo --zip=ckr-ctuning-datasets.zip --quiet
$ ck ls dataset --all
$ ck search dataset --tags=image,jpeg
$ ck compile program:cbench-automotive-susan --speed
$ ck run program:cbench-automotive-susan
$ ck compile program:shared-matmul-c2 --flags="-DUSE_BLOCKED_MATMUL=YES
$ ck run program:shared-matmul-c2 --env.CT_MATRIX_DIMENSION=128 --env.CT_BLOCK_SIZE=16
$ ck find script:rpi3-all-autotune-multiple-datasets
$ ck find script:rpi3-input-aware-autotune-blas
11 Reinventing computer engineering via reproducible competitions
Having a common and customizable workflow framework with "plug&play" artifacts
opens up another interesting opportunity for computer engineering.
Researchers can use it to compare and improve their techniques
(optimizations, models, algorithms, architectures)
against each other via open and reproducible competitions
while being on the same page.
●
12 Conclusions and Future Work
Researchers are now in a race to bring artificial intelligence to all possible
devices from IoT to supercomputers which will require
much more efficient software and hardware then currently available.
At the same time, computer engineers have already been struggling for many years
to develop efficient sub-components of computer systems including
algorithms, compilers and run-time systems.
13 Acknowledgments
![]()
![]()
A Artifact Appendix
A.1 Abstract
A.2 Description
A.2.1 Check-list (artifact meta information)
●
●
●
●
●
●
●
●
●
●
●
●
●
● A.2.2 How software can be obtained (if available)
$ sudo pip install ck
$ ck pull repo:ck-rpi-optimization-results
$ ck add repo:ck-rpi-optimization-results-reactions --zip=https://ndownloader.figshare.com/files/10218435 --quiet
$ ck add repo:ck-rpi-optimization-results-reactions2 --zip=https://ndownloader.figshare.com/files/10218441 --quiet
$ ck ls experiment:rpi3-*
A.2.3 Hardware dependencies
A.2.4 Software dependencies
●
●
●
●
● A.2.5 Data sets
A.3 Installation
$ sudo pip install ck
$ ck pull repo:ck-rpi-optimization-results
$ ck compile program:zlib --speed
$ ck pull repo:ck-dev-compilers
$ ck install package:compiler-gcc-any-src-linux-no-deps --env.PARALLEL_BUILDS=1 --env.GCC_COMPILE_CFLAGS=-O0 --env.GCC_COMPILE_CXXFLAGS=-O0 --env.EXTRA_CFG_GCC=--disable-bootstrap --env.RPI3=YES --force_version=7.1.0
$ ck show env --tags=gcc
$ sudo apt-get install texinfo build-essential libgmp-dev libmpfr-dev libisl-dev libcloog-isl-dev libmpc-dev
A.4 Experiment workflow
$ ck autotune program:zlib --iterations=150 --repetitions=3 --scenario=9d88674c45b94971 --cmd_key=decode --record_uoa=my-first-experiment
$ ck find experiment:my-first-experiment
$ ck plot graph:my-first-experiment
$ ck browser experiment:my-first-experiment
$ ck compile program:zlib --flags="some flags"
$ ck run program:zlib
$ ck crowdsource program.optimization --gcc
A.5 Evaluation and expected result
$ ck ls ck-rpi-optimization-results:script:* | sort
$ ls `ck find script:rpi3-susan-autotune`
$ ck ls ck-rpi-optimization-results:experiment:* | sort
$ ck browser experiment:rpi3-zlib-decode-gcc4-150b-rnd-frontier
$ ck replay experiment:b0f31c56475aa510 --point=46049203405c5347
A.6 Experimental methodology
A.7 Notes
$ ck ls script:rpi3-*
$ ck ls converting-ad-hoc-works-to-ck-*
$ ck find script:rpi3-susan-autotune
$ ck find script:rpi3-susan-graphs
$ ck find script:rpi3-susan-reduce
$ ck find script:rpi3-all-autotune
$ ck find script:rpi3-all-autotune
$ ck find script:rpi3-crowdtune
$ ck find script:rpi3-zlib-decode-autotune
$ ck find script:rpi3-zlib-decode-graphs
$ ck find script:rpi3-zlib-decode-reduce
$ ck find script:rpi3-zlib-encode-autotune
$ ck find script:rpi3-zlib-encode-graphs
$ ck find script:rpi3-zlib-encode-reduce
$ ck find script:rpi3-susan-fuzz-bugs
$ ck find script:rpi3-crowdmodel
$ ck find script:rpi3-all-autotune-multiple-datasets
$ ck find script:rpi3-input-aware-autotune-blas
$ ck find script:converting-ad-hoc-works-to-ck-slambench-autotuning
A.8 Conclusion
References
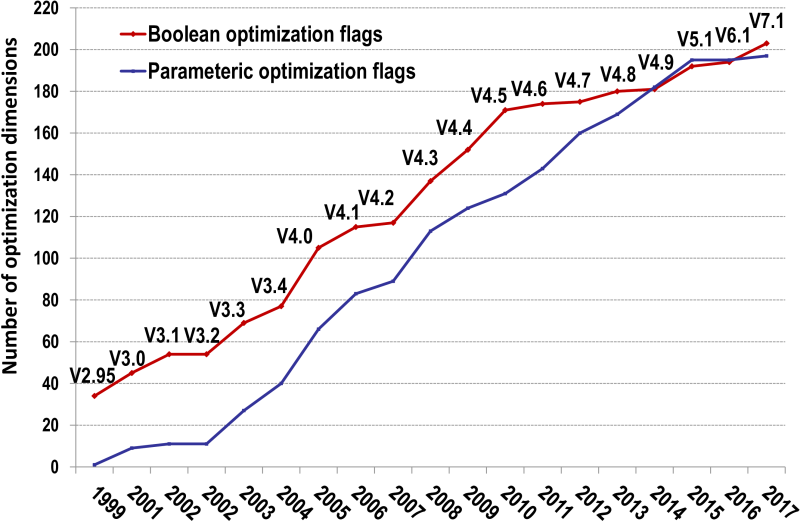
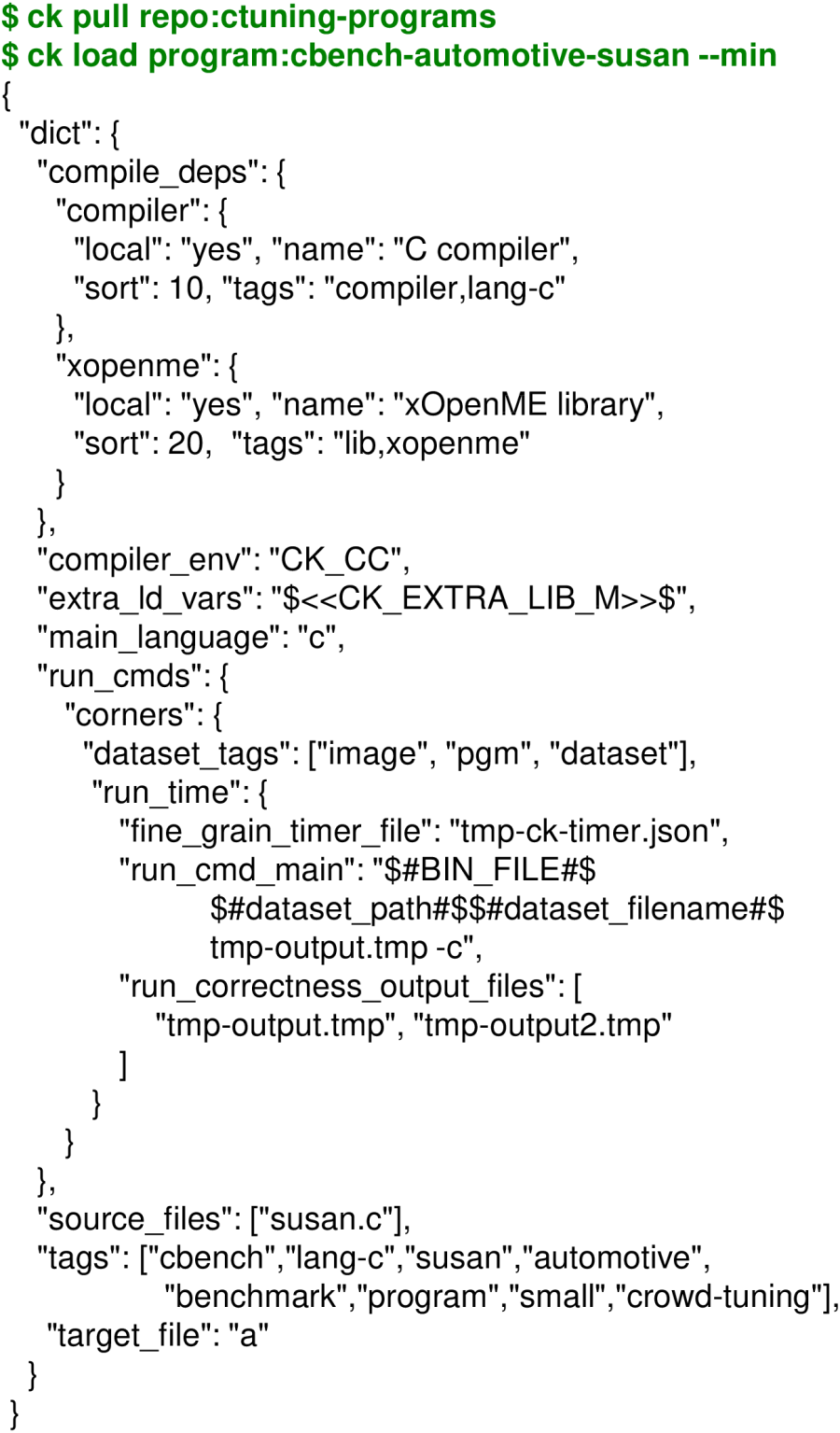
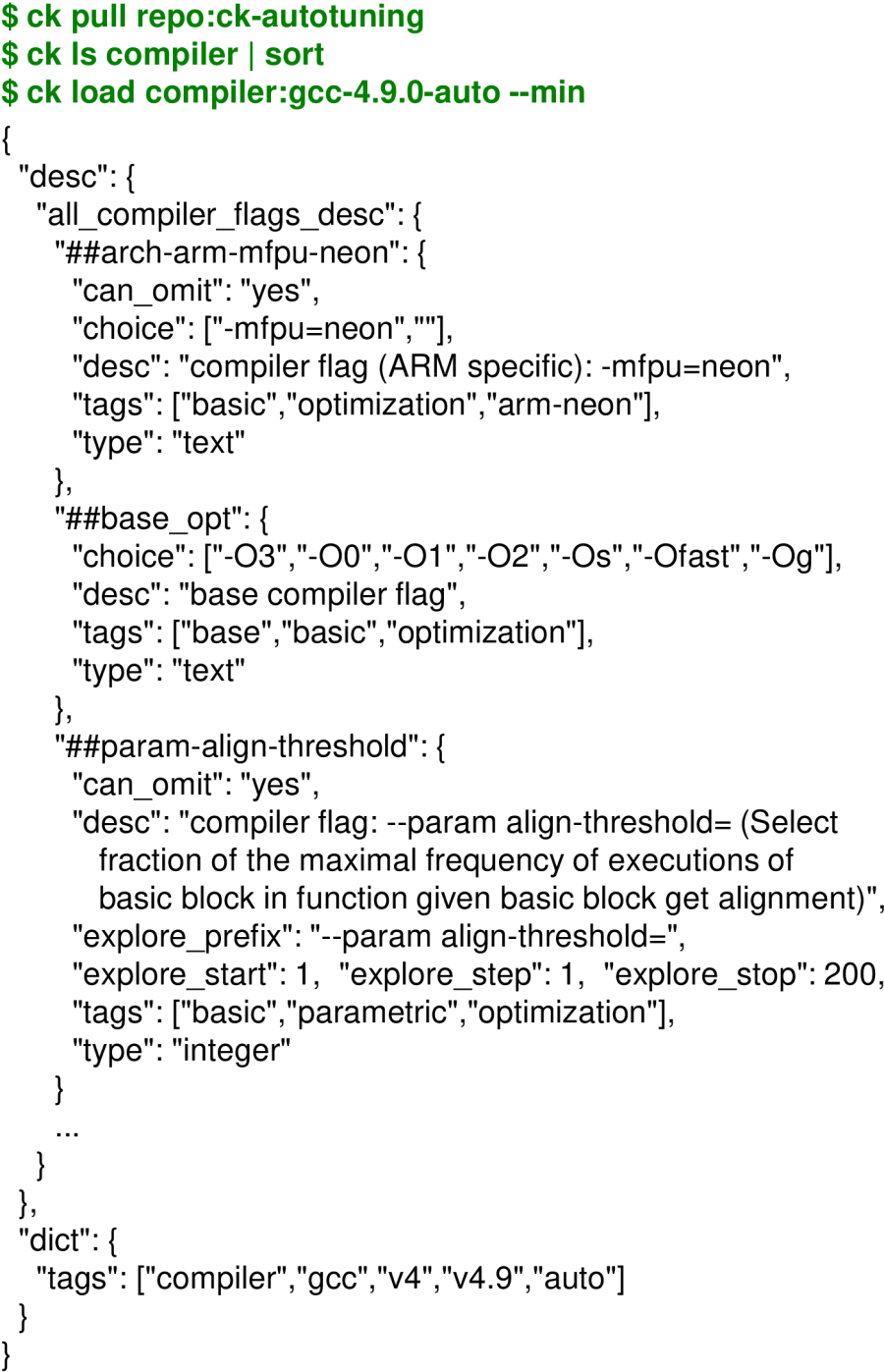
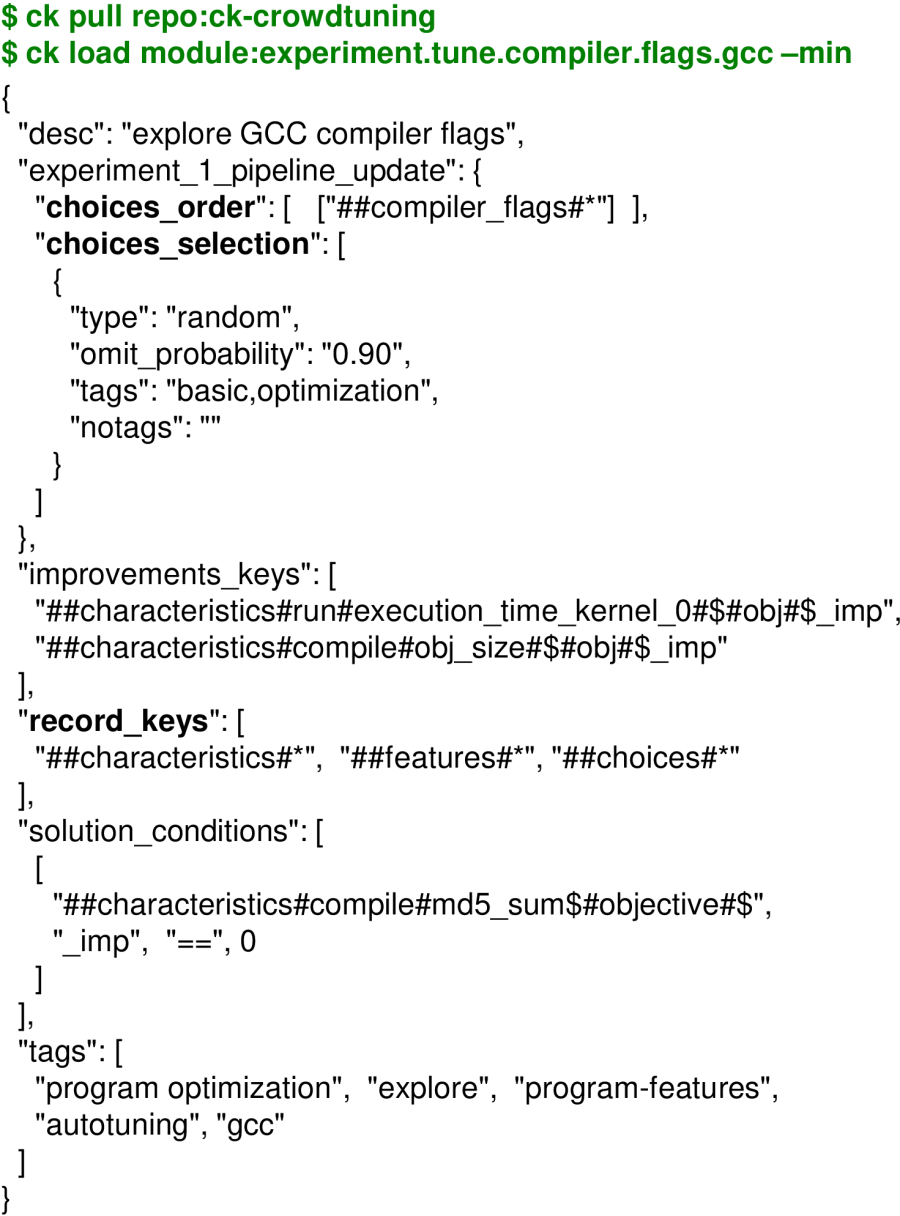
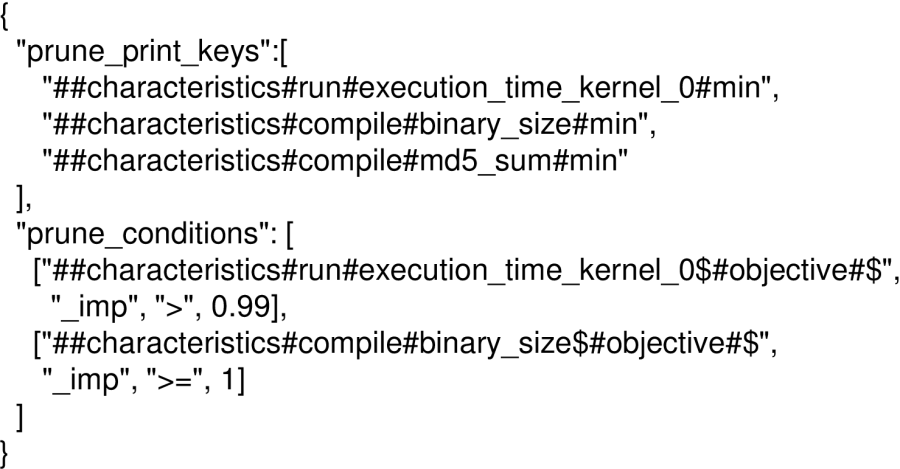
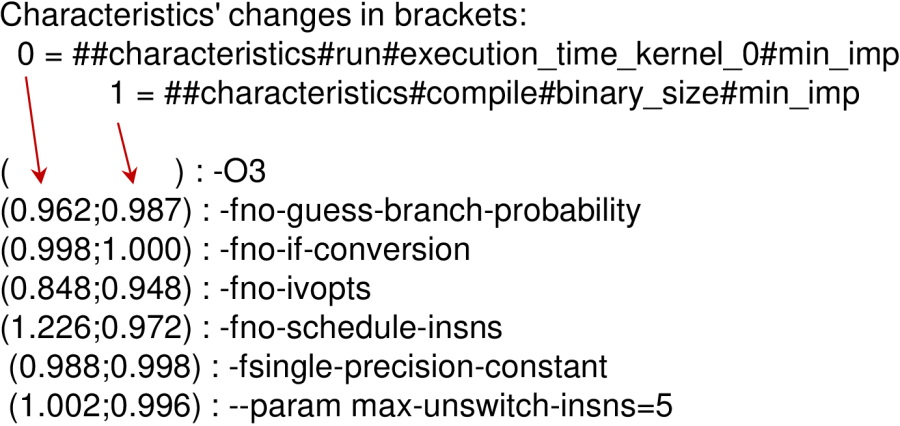
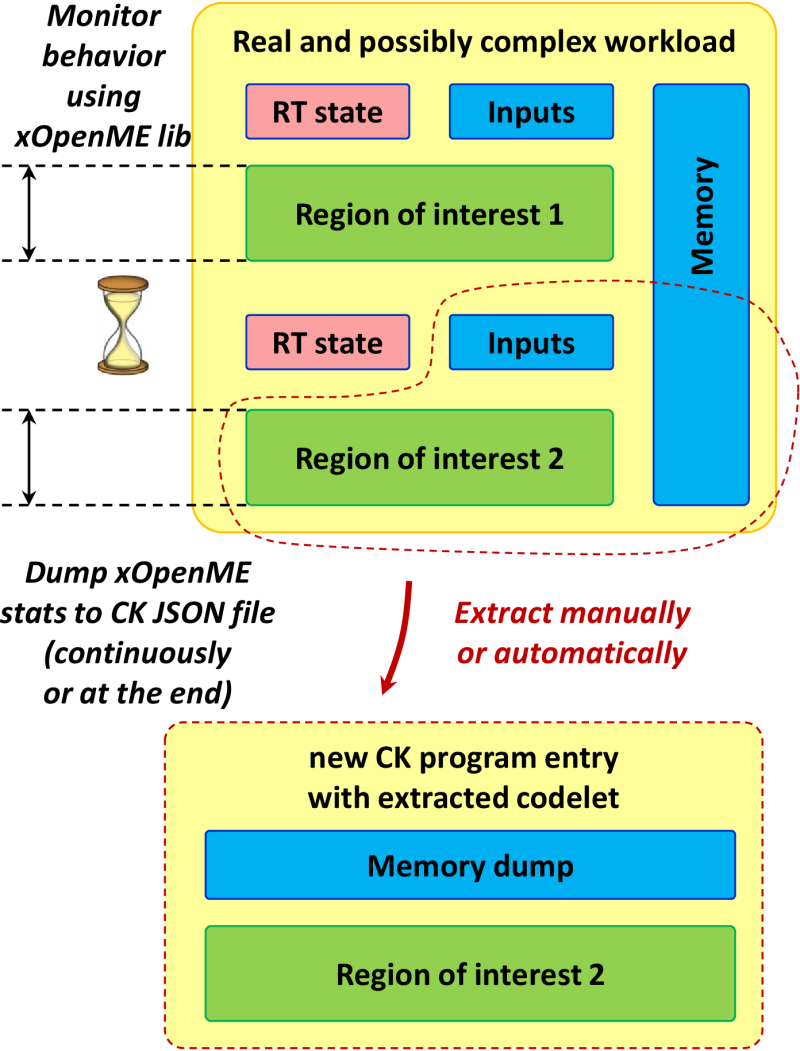
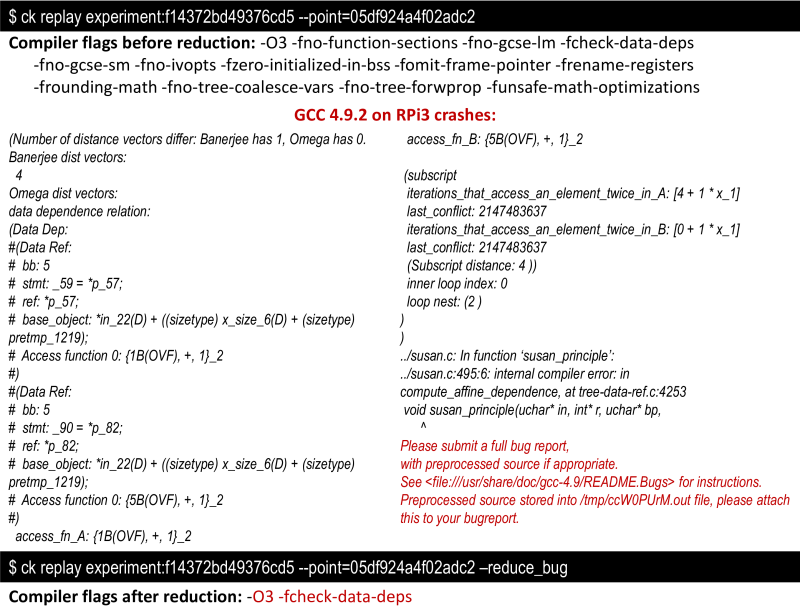
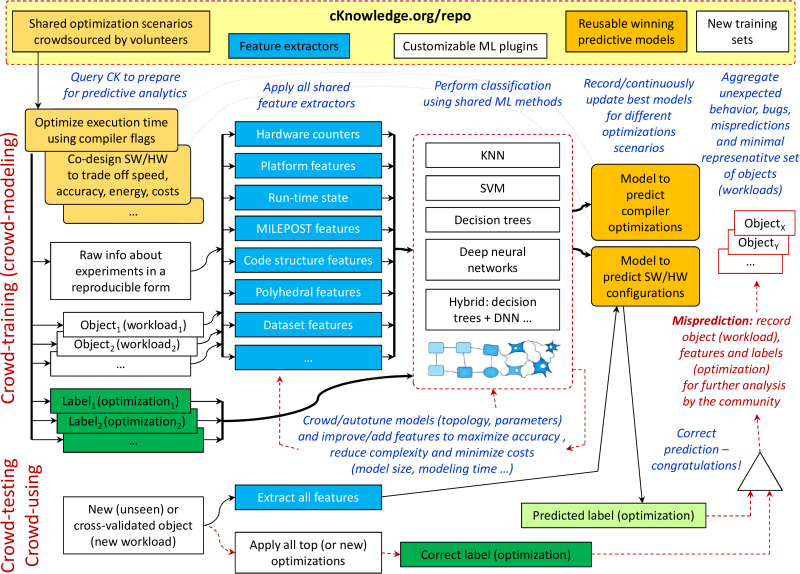
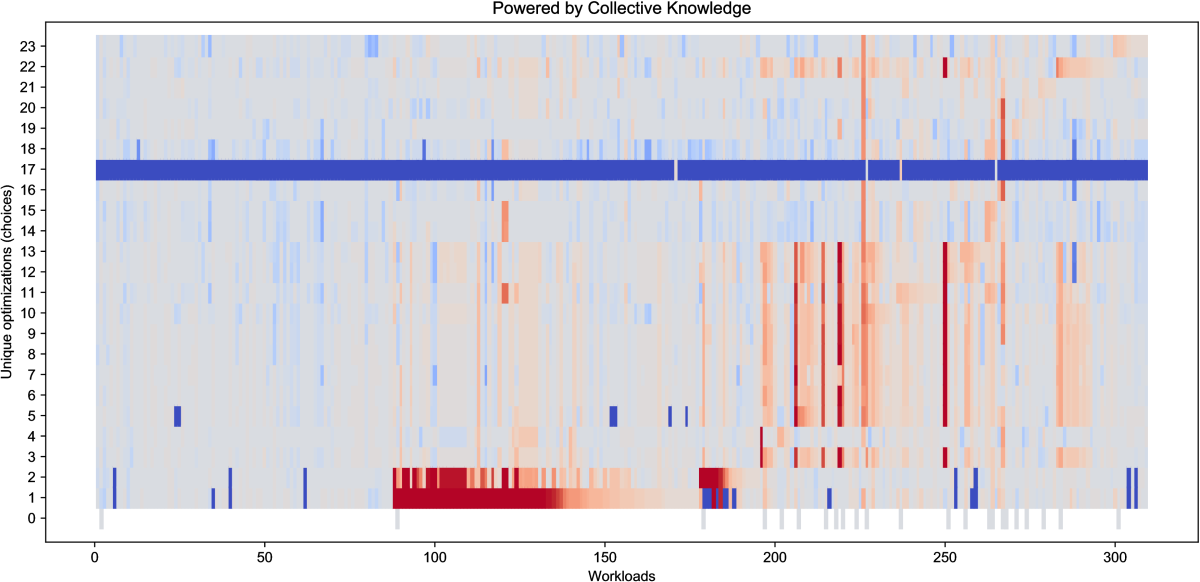
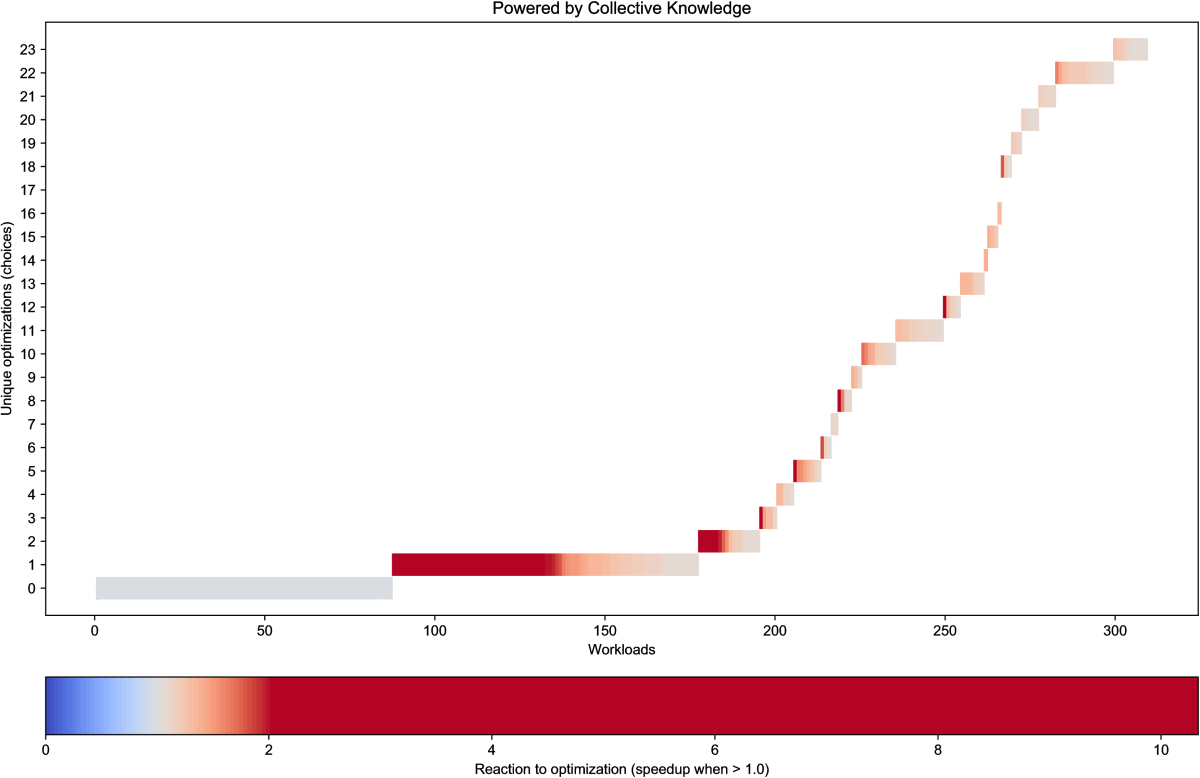
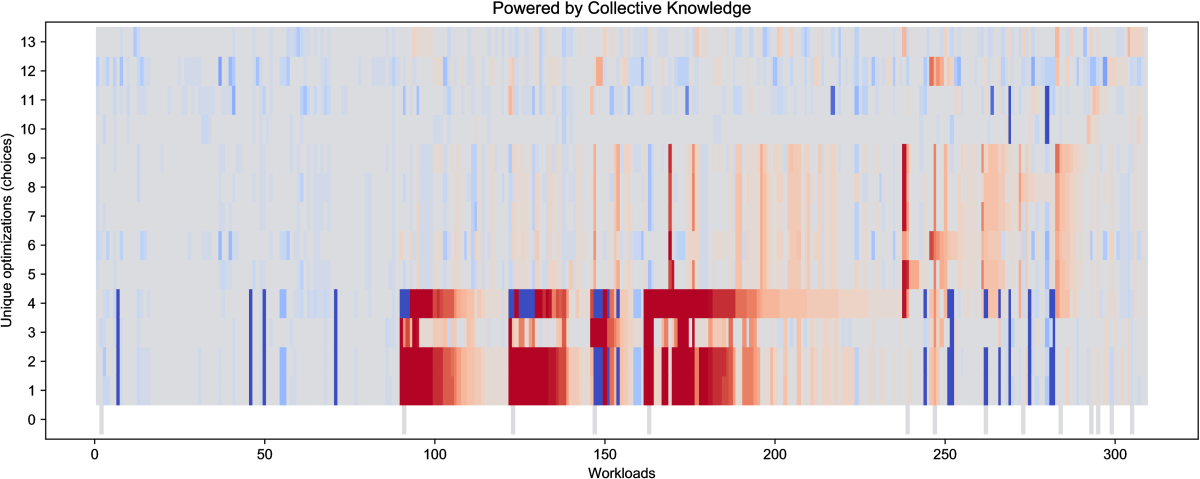
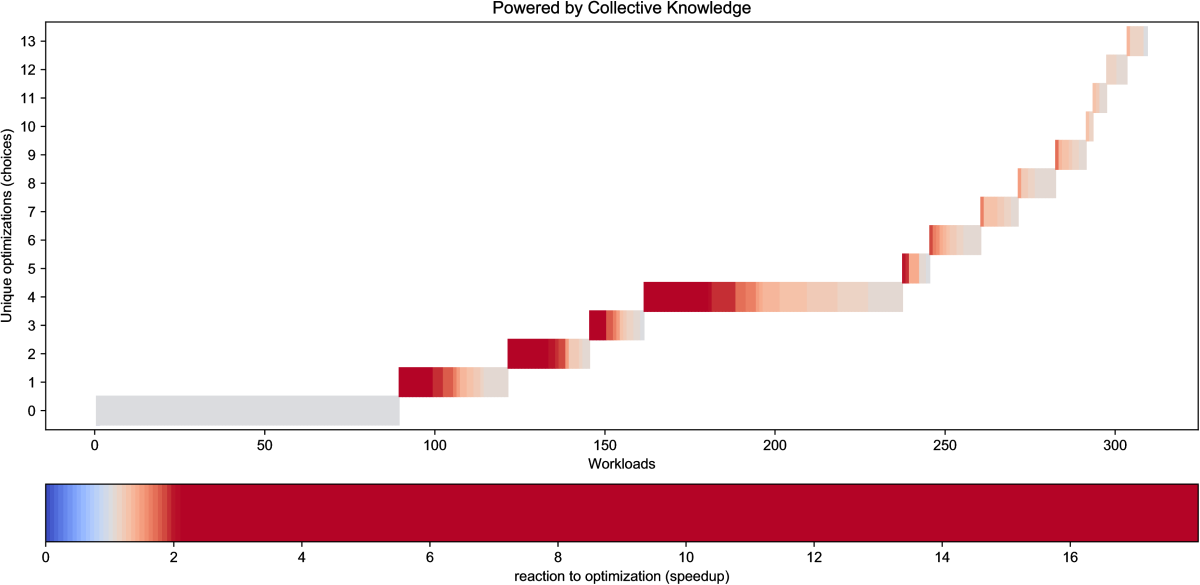
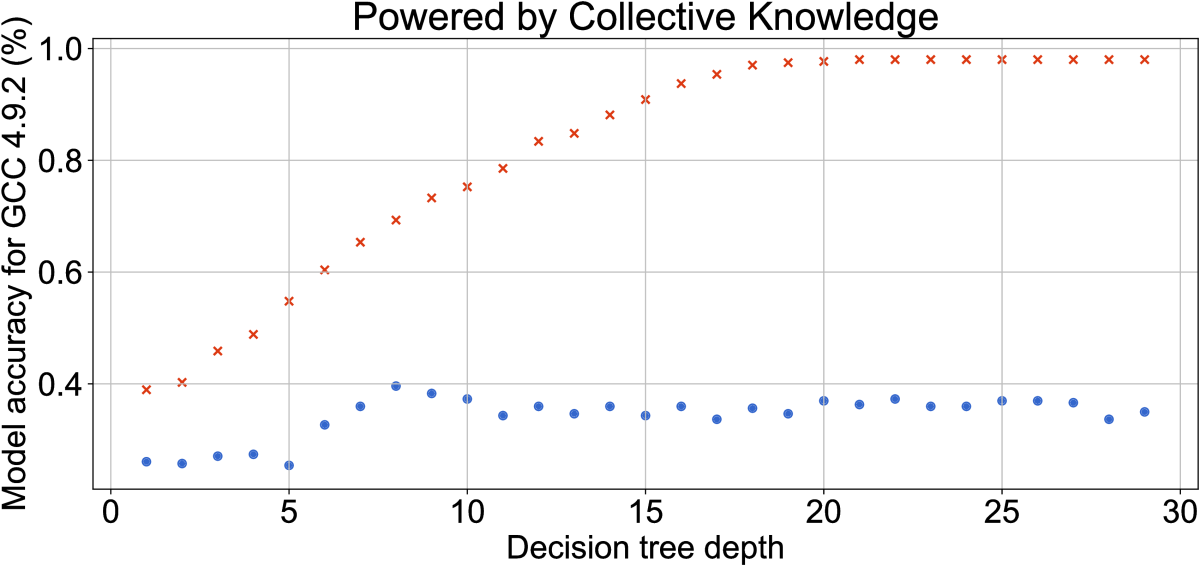
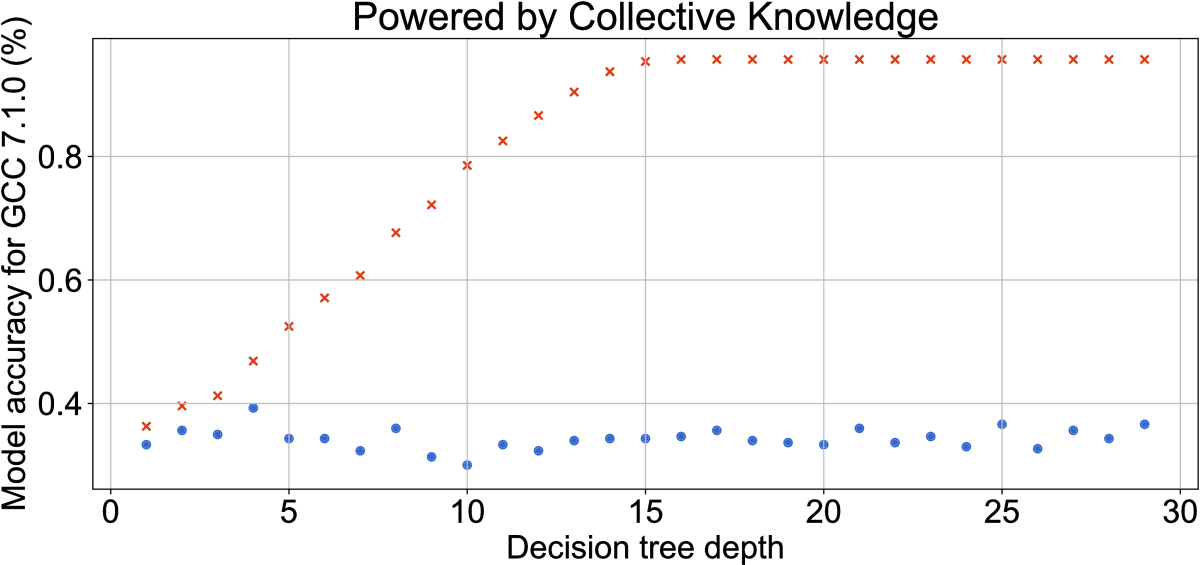
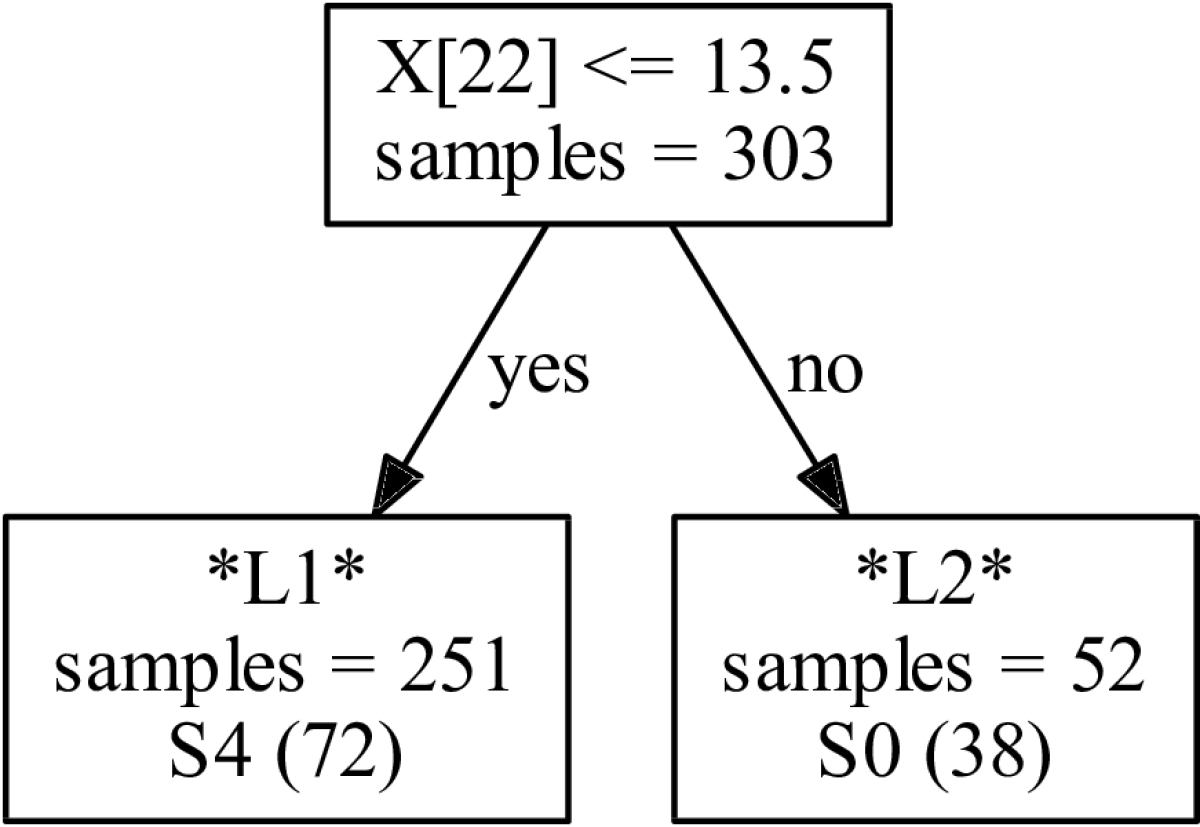
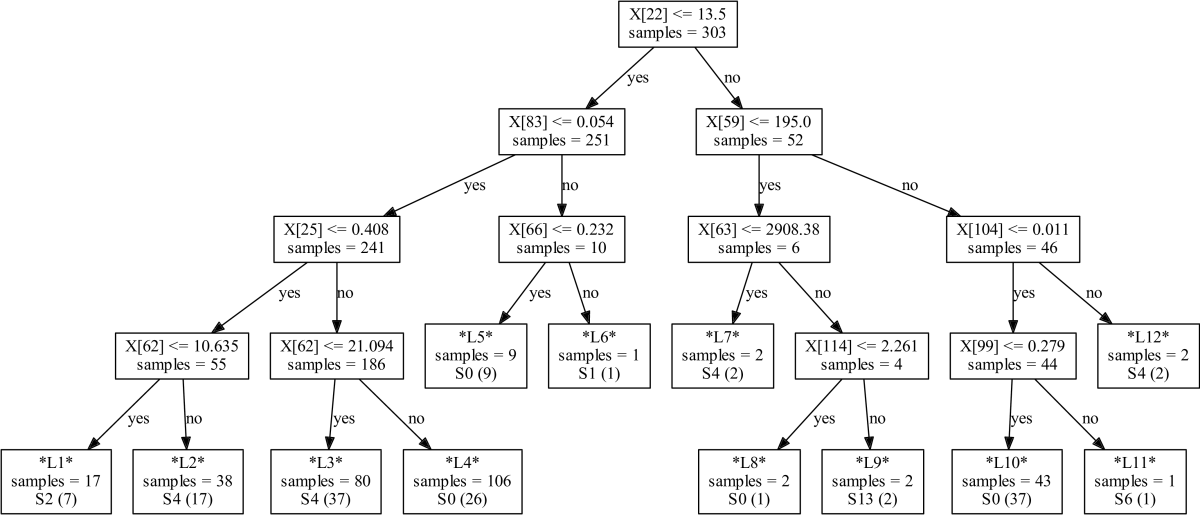
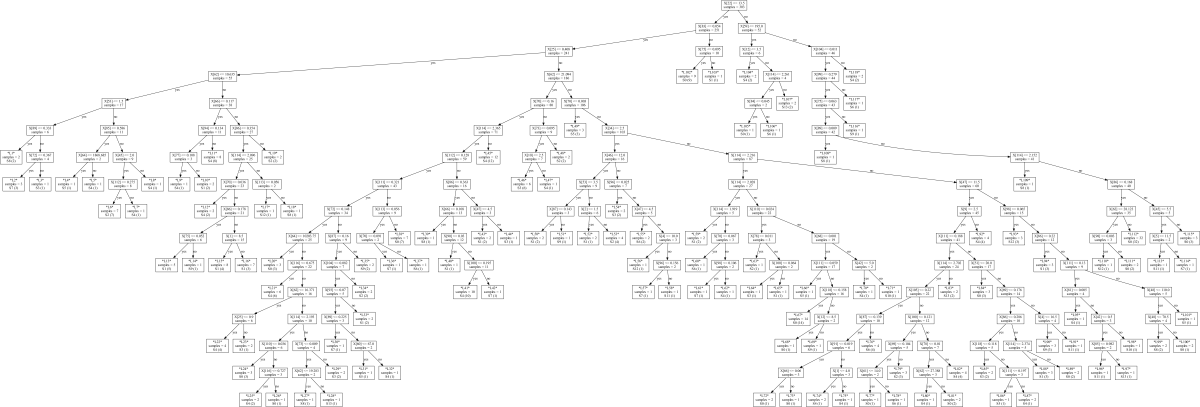
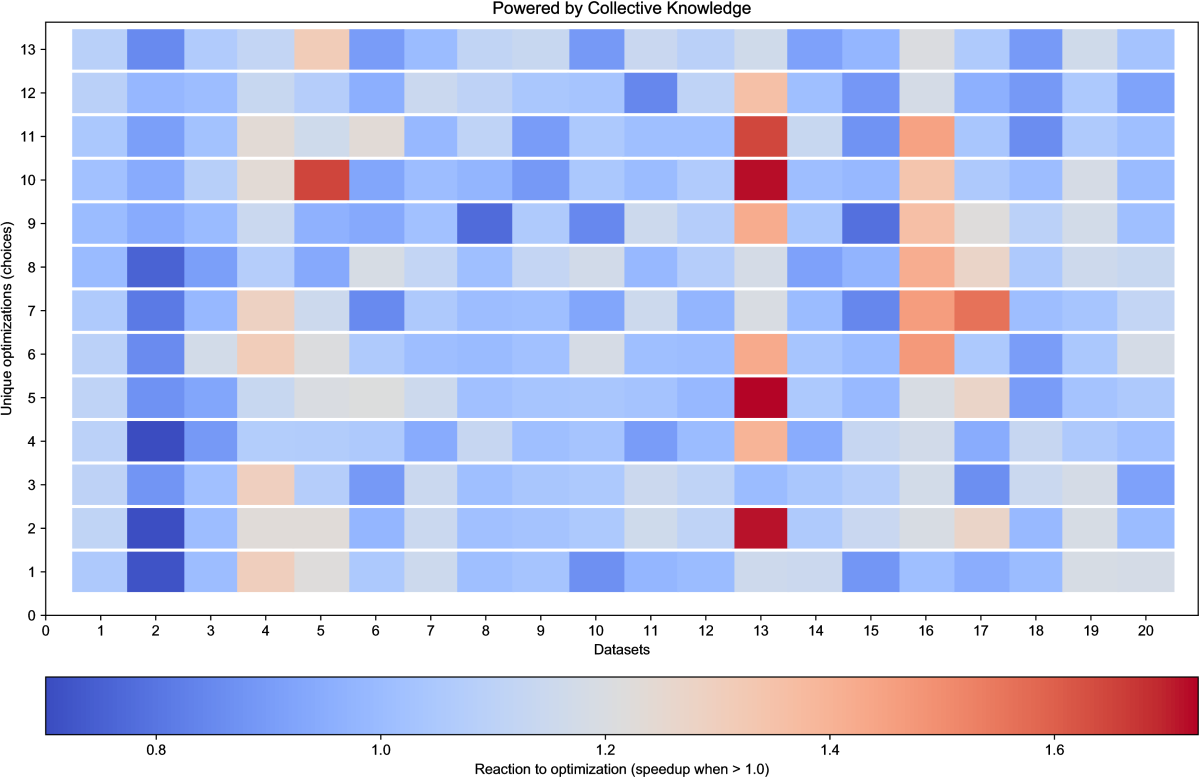
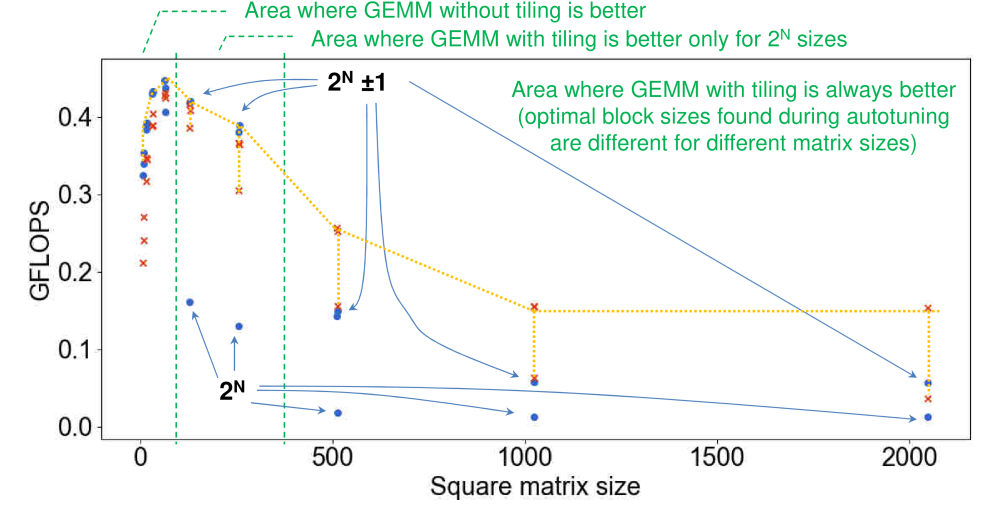
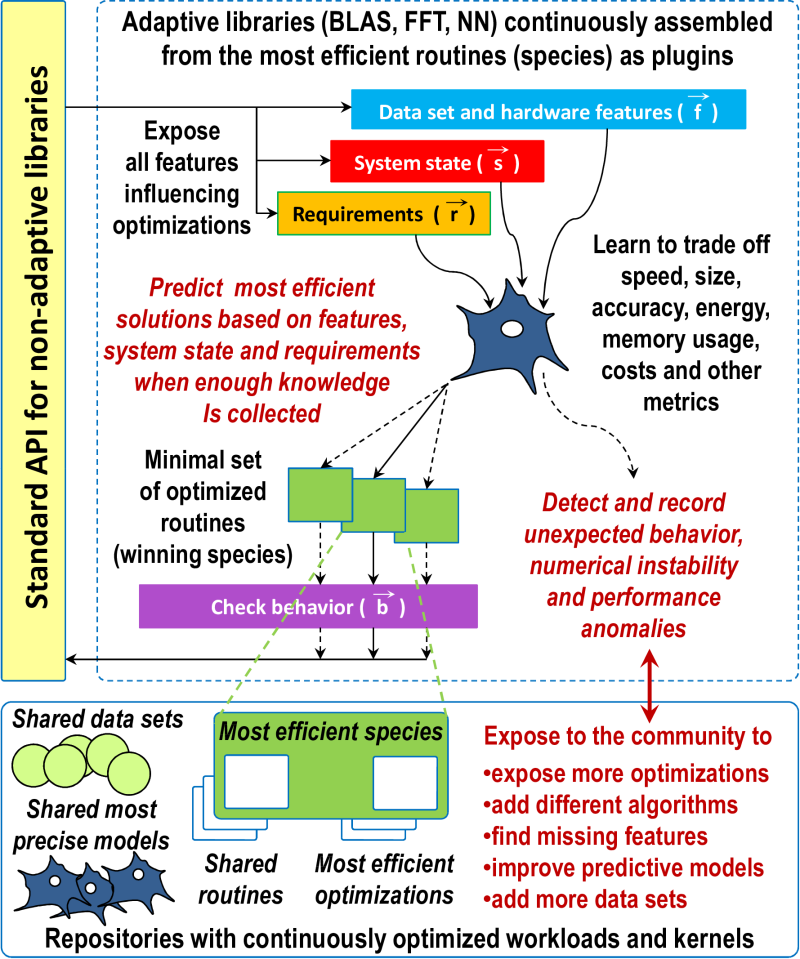
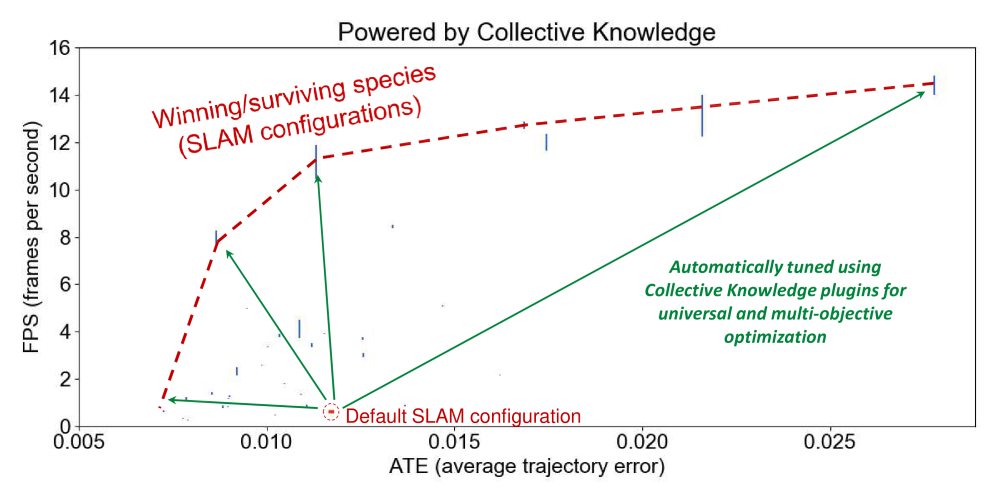
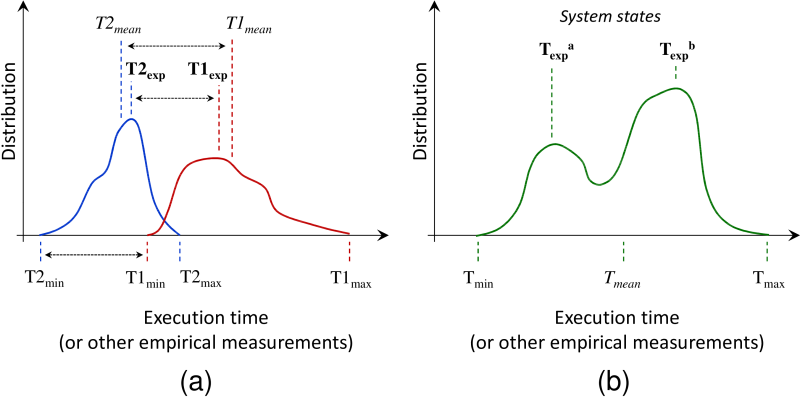
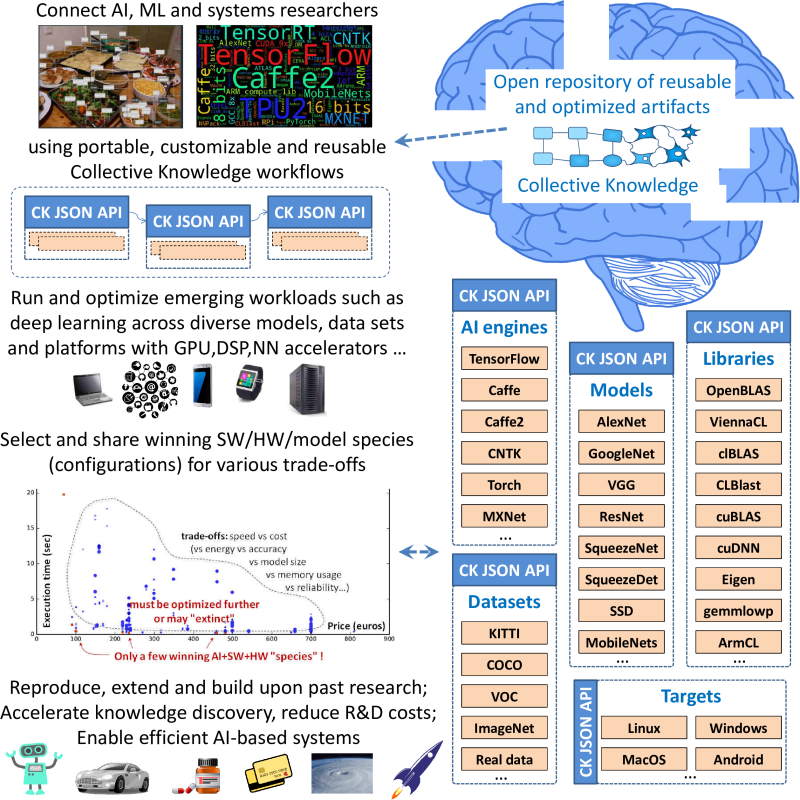
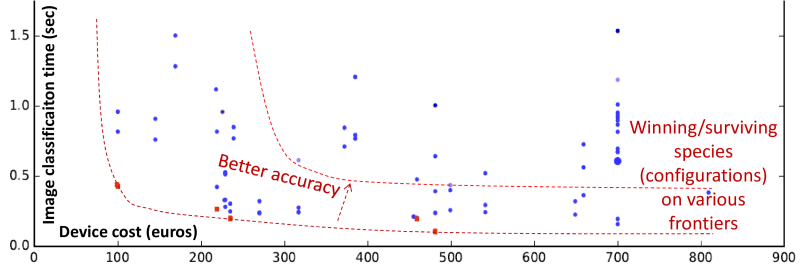
| [1] | The HiPEAC vision on high-performance and embedded architecture and
compilation (2012-2020).
http://www.hipeac.net/roadmap, 2017. |
| [2] | J. Dongarra et.al.
The international exascale software project roadmap. Int. J. High Perform. Comput. Appl., 25(1):3--60, Feb. 2011. |
| [3] | PRACE: partnership for advanced computing in europe.
http://www.prace-project.eu. |
| [4] | G. Fursin, R. Miceli, A. Lokhmotov, M. Gerndt, M. Baboulin, D. Malony, Allen,
Z. Chamski, D. Novillo, and D. D. Vento.
Collective Mind: Towards practical and collaborative auto-tuning. Scientific Programming, 22(4):309--329, July 2014. |
| [5] | G. Fursin.
Collective Tuning Initiative: automating and accelerating development and optimization of computing systems. In Proceedings of the GCC Developers' Summit, June 2009. |
| [6] | G. Fursin, A. Memon, C. Guillon, and A. Lokhmotov.
Collective Mind, Part II: Towards performance- and cost-aware software engineering as a natural science. In 18th International Workshop on Compilers for Parallel Computing (CPC'15), January 2015. |
| [7] | Artifact Evaluation for Computer Systems Conferences including CGO,PPoPP,PACT
and SuperComputing: developing common experimental methodology and tools for
reproducible and sustainable research.
Link, 2014-cur. |
| [8] | B. R. Childers, G. Fursin, S. Krishnamurthi, and A. Zeller.
Artifact Evaluation for Publications (Dagstuhl Perspectives Workshop 15452). 5(11), 2016. |
| [9] | G. Fursin and C. Dubach.
Community-driven reviewing and validation of publications. In Proceedings of the 1st Workshop on Reproducible Research Methodologies and New Publication Models in Computer Engineering (ACM SIGPLAN TRUST'14). ACM, 2014. |
| [10] | R. Whaley and J. Dongarra.
Automatically tuned linear algebra software. In Proceedings of the Conference on High Performance Networking and Computing, 1998. |
| [11] | F. Matteo and S. Johnson.
FFTW: An adaptive software architecture for the FFT. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing, volume 3, pages 1381--1384, Seattle, WA, May 1998. |
| [12] | K. Cooper, P. Schielke, and D. Subramanian.
Optimizing for reduced code space using genetic algorithms. In Proceedings of the Conference on Languages, Compilers, and Tools for Embedded Systems (LCTES), pages 1--9, 1999. |
| [13] | M. Voss and R. Eigenmann.
ADAPT: Automated de-coupled adaptive program transformation. In Proceedings of International Conference on Parallel Processing, 2000. |
| [14] | G. Fursin, M. O'Boyle, and P. Knijnenburg.
Evaluating iterative compilation. In Proceedings of the Workshop on Languages and Compilers for Parallel Computers (LCPC), pages 305--315, 2002. |
| [15] | C. Ţăpuş, I.-H. Chung, and J. K. Hollingsworth.
Active harmony: towards automated performance tuning. In Proceedings of the 2002 ACM/IEEE conference on Supercomputing, Supercomputing '02, pages 1--11, Los Alamitos, CA, USA, 2002. IEEE Computer Society Press. |
| [16] | P. Kulkarni, W. Zhao, H. Moon, K. Cho, D. Whalley, J. Davidson, M. Bailey,
Y. Paek, and K. Gallivan.
Finding effective optimization phase sequences. In Proceedings of the Conference on Languages, Compilers, and Tools for Embedded Systems (LCTES), pages 12--23, 2003. |
| [17] | B. Singer and M. Veloso.
Learning to predict performance from formula modeling and training data. In Proceedings of the Conference on Machine Learning, 2000. |
| [18] | J. Lu, H. Chen, P.-C. Yew, and W.-C. Hsu.
Design and implementation of a lightweight dynamic optimization system. In Journal of Instruction-Level Parallelism, volume 6, 2004. |
| [19] | C. Lattner and V. Adve.
LLVM: A compilation framework for lifelong program analysis & transformation. In Proceedings of the 2004 International Symposium on Code Generation and Optimization (CGO'04), Palo Alto, California, March 2004. |
| [20] | Z. Pan and R. Eigenmann.
Fast and effective orchestration of compiler optimizations for automatic performance tuning. In Proceedings of the International Symposium on Code Generation and Optimization (CGO), pages 319--332, 2006. |
| [21] | S. S. Shende and A. D. Malony.
The tau parallel performance system. Int. J. High Perform. Comput. Appl., 20(2):287--311, May 2006. |
| [22] | D. Bailey, J. Chame, C. Chen, J. Dongarra, M. Hall, J. Hollingsworth,
P. Hovland, S. Moore, K. Seymour, J. Shin, A. Tiwari, S. Williams, and
H. You.
PERI auto-tuning. Journal of Physics: Conference Series, 125(1):012089, 2008. |
| [23] | A. Hartono, B. Norris, and P. Sadayappan.
Annotation-based empirical performance tuning using orio. In 23rd IEEE International Symposium on Parallel and Distributed Processing, IPDPS 2009, Rome, Italy, May 23-29, 2009, pages 1--11, 2009. |
| [24] | G. Fursin, Y. Kashnikov, A. W. Memon, Z. Chamski, O. Temam, M. Namolaru,
E. Yom-Tov, B. Mendelson, A. Zaks, E. Courtois, F. Bodin, P. Barnard,
E. Ashton, E. Bonilla, J. Thomson, C. Williams, and M. F. P. O'Boyle.
Milepost gcc: Machine learning enabled self-tuning compiler. International Journal of Parallel Programming (IJPP), 39:296--327, 2011. 10.1007/s10766-010-0161-2. |
| [25] | S. Tomov, R. Nath, H. Ltaief, and J. Dongarra.
Dense linear algebra solvers for multicore with GPU accelerators. In Proc. of the IEEE IPDPS'10, pages 1--8, Atlanta, GA, April 19-23 2010. IEEE Computer Society. DOI: 10.1109/IPDPSW.2010.5470941. |
| [26] | Open benchmarking: automated testing & benchmarking on an open platform.
Link, 2017. |
| [27] | G. Ren, E. Tune, T. Moseley, Y. Shi, S. Rus, and R. Hundt.
Google-wide profiling: A continuous profiling infrastructure for data centers. IEEE Micro, 30(4):65--79, July 2010. |
| [28] | S. Grauer-Gray, L. Xu, R. Searles, S. Ayalasomayajula, and J. Cavazos.
Auto-tuning a high-level language targeted to GPU codes. In Innovative Parallel Computing (InPar), 2012, pages 1--10, May 2012. |
| [29] | D. Grewe, Z. Wang, and M. F. P. O'Boyle.
Portable mapping of data parallel programs to opencl for heterogeneous systems. In Proceedings of the 2013 IEEE/ACM International Symposium on Code Generation and Optimization, CGO 2013, Shenzhen, China, February 23-27, 2013, pages 22:1--22:10, 2013. |
| [30] | M. Khan, P. Basu, G. Rudy, M. Hall, C. Chen, and J. Chame.
A script-based autotuning compiler system to generate high-performance cuda code. ACM Trans. Archit. Code Optim., 9(4):31:1--31:25, Jan. 2013. |
| [31] | J. Ansel, S. Kamil, K. Veeramachaneni, J. Ragan-Kelley, J. Bosboom, U.-M.
O'Reilly, and S. Amarasinghe.
Opentuner: An extensible framework for program autotuning. In International Conference on Parallel Architectures and Compilation Techniques, Edmonton, Canada, August 2014. |
| [32] | Y. M. Tsai, P. Luszczek, J. Kurzak, and J. J. Dongarra.
Performance-portable autotuning of opencl kernels for convolutional layers of deep neural networks. In 2nd Workshop on Machine Learning in HPC Environments, MLHPC@SC, Salt Lake City, UT, USA, November 14, 2016, pages 9--18, 2016. |
| [33] | A. Abdelfattah, A. Haidar, S. Tomov, and J. J. Dongarra.
Performance, design, and autotuning of batched GEMM for gpus. In High Performance Computing - 31st International Conference, ISC High Performance 2016, Frankfurt, Germany, June 19-23, 2016, Proceedings, pages 21--38, 2016. |
| [34] | Collective Knowledge: open-source, customizable and cross-platform workflow
framework and repository for computer systems research.
Link, 2016. |
| [35] | G. Fursin, A. Lokhmotov, and E. Plowman.
Collective Knowledge: towards R&D sustainability. In Proceedings of the Conference on Design, Automation and Test in Europe (DATE'16), March 2016. |
| [36] | Introducing JSON.
http://www.json.org. |
| [37] | D. P. Anderson, J. Cobb, E. Korpela, M. Lebofsky, and D. Werthimer.
Seti@home: An experiment in public-resource computing. Commun. ACM, 45(11):56--61, Nov. 2002. |
| [38] | Open collective knowledge repository with shared optimization results from
crowdsourced experiments across diverse platforms and data sets.
Link. |
| [39] | Public optimization results when crowd-tuning gcc 7.1.0 across raspberry pi3
devices.
link. |
| [40] | ReQuEST: open tournaments on collaborative, reproducible and pareto-efficient
software/hardware co-design of emerging workloads such as deep learning using
collective knowledge technology.
Link, 2017. |
| [41] | MILEPOST project archive (MachIne Learning for Embedded PrOgramS
opTimization).
Link. |
| [42] | cTuning.org: public portal for collaborative and reproducible computer
engineering.
Link. |
| [43] | Zenodo - research data repository.
Link, 2013. |
| [44] | Figshare - online digital repository where researchers can preserve and share
their research outputs, including figures, datasets, images, and videos.
Link, 2011. |
| [45] | Digital Object Identifier or DOI - a persistent identifier or handle used to
uniquely identify objects, standardized by the iso.
Link, 2000. |
| [46] | Proceedings of the 1st workshop on reproducible research methodologies and new
publication models in computer engineering (acm sigplan trust'14).
ACM, 2014. |
| [47] | T. Oinn, M. Addis, J. Ferris, D. Marvin, M. Senger, M. Greenwood, T. Carver,
K. Glover, M. R. Pocock, A. Wipat, and P. Li.
Taverna: a tool for the composition and enactment of bioinformatics workflows. Bioinformatics, 20(17):3045--3054, 2004. |
| [48] | J. E. Smith and R. Nair.
The architecture of virtual machines. Computer, 38(5):32--38, May 2005. |
| [49] | Docker: open source lightweight container technology that can run processes
in isolation.
Link. |
| [50] | TETRACOM - eu fp7 project to support technology transfer in computing
systems.
Link, 2014. |
| [51] | Blog article: CK concepts by Michel Steuwer.
Link. |
| [52] | Ck repository with multi-platform software and package manager implemented as
ck modules which detect or install various software (compilers, libraries,
tools).
Link, 2015. |
| [53] | T. Gamblin, M. LeGendre, M. R. Collette, G. L. Lee, A. Moody, B. R.
de Supinski, and S. Futral.
The spack package manager: Bringing order to hpc software chaos. In Proceedings of the International Conference for High Performance Computing, Networking, Storage and Analysis, SC '15, pages 40:1--40:12, New York, NY, USA, 2015. ACM. |
| [54] | K. Hoste, J. Timmerman, A. Georges, and S. D. Weirdt.
Easybuild: Building software with ease. In 2012 SC Companion: High Performance Computing, Networking Storage and Analysis, Salt Lake City, UT, USA, November 10-16, 2012, pages 572--582, 2012. |
| [55] | S. Ainsworth and T. M. Jones.
Software prefetching for indirect memory accesses. In Proceedings of the 2017 International Symposium on Code Generation and Optimization, CGO '17, pages 305--317, Piscataway, NJ, USA, 2017. IEEE Press. |
| [56] | Artifacts and experimental workflows in the Collective Knowledge Format for
the CGO'17 paper "Software Prefetching for Indirect Memory Accesses".
Link, 2017. |
| [57] | D. Wilkinson, B. Childers, R. Bernard, W. Graves, and J. Davidson.
Acm pilot demo 1 - collective knowledge: Packaging and sharing. version 3. 2017. |
| [58] | B. Aarts and et.al.
OCEANS: Optimizing compilers for embedded applications. In Proc. Euro-Par 97, volume 1300 of Lecture Notes in Computer Science, pages 1351--1356, 1997. |
| [59] | B. Calder, D. Grunwald, M. Jones, D. Lindsay, J. Martin, M. Mozer, and B. Zorn.
Evidence-based static branch prediction using machine learning. ACM Transactions on Programming Languages and Systems (TOPLAS), 1997. |
| [60] | A. Nisbet.
Iterative feedback directed parallelisation using genetic algorithms. In Proceedings of the Workshop on Profile and Feedback Directed Compilation in conjunction with International Conference on Parallel Architectures and Compilation Technique (PACT), 1998. |
| [61] | T. Kisuki, P. Knijnenburg, and M. O'Boyle.
Combined selection of tile sizes and unroll factors using iterative compilation. In Proceedings of the International Conference on Parallel Architectures and Compilation Techniques (PACT), pages 237--246, 2000. |
| [62] | M. Stephenson, S. Amarasinghe, M. Martin, and U.-M. O'Reilly.
Meta optimization: Improving compiler heuristics with machine learning. In Proceedings of the ACM SIGPLAN Conference on Programming Language Design and Implementation (PLDI'03), pages 77--90, June 2003. |
| [63] | B. Franke, M. O'Boyle, J. Thomson, and G. Fursin.
Probabilistic source-level optimisation of embedded programs. In Proceedings of the Conference on Languages, Compilers, and Tools for Embedded Systems (LCTES), 2005. |
| [64] | K. Hoste and L. Eeckhout.
Cole: Compiler optimization level exploration. In Proceedings of the International Symposium on Code Generation and Optimization (CGO), 2008. |
| [65] | Bailey and et.al.
Peri auto-tuning. Journal of Physics: Conference Series (SciDAC 2008), 125:1--6, 2008. |
| [66] | V. Jimenez, I. Gelado, L. Vilanova, M. Gil, G. Fursin, and N. Navarro.
Predictive runtime code scheduling for heterogeneous architectures. In Proceedings of the International Conference on High Performance Embedded Architectures & Compilers (HiPEAC 2009), January 2009. |
| [67] | J. Ansel, C. Chan, Y. L. Wong, M. Olszewski, Q. Zhao, A. Edelman, and
S. Amarasinghe.
Petabricks: a language and compiler for algorithmic choice. In Proceedings of the 2009 ACM SIGPLAN conference on Programming language design and implementation, PLDI '09, pages 38--49, New York, NY, USA, 2009. ACM. |
| [68] | J. Mars, N. Vachharajani, R. Hundt, and M. L. Soffa.
Contention aware execution: Online contention detection and response. In Proceedings of the 8th Annual IEEE/ACM International Symposium on Code Generation and Optimization, CGO '10, pages 257--265, New York, NY, USA, 2010. ACM. |
| [69] | R. W. Moore and B. R. Childers.
Automatic generation of program affinity policies using machine learning. In CC, pages 184--203, 2013. |
| [70] | J. Shen, A. L. Varbanescu, H. J. Sips, M. Arntzen, and D. G. Simons.
Glinda: a framework for accelerating imbalanced applications on heterogeneous platforms. In Conf. Computing Frontiers, page 14, 2013. |
| [71] | R. Miceli et.al.
Autotune: A plugin-driven approach to the automatic tuning of parallel applications. In Proceedings of the 11th International Conference on Applied Parallel and Scientific Computing, PARA'12, pages 328--342, Berlin, Heidelberg, 2013. Springer-Verlag. |
| [72] | I. Manotas, L. Pollock, and J. Clause.
Seeds: A software engineer's energy-optimization decision support framework. In Proceedings of the 36th International Conference on Software Engineering, ICSE 2014, pages 503--514, New York, NY, USA, 2014. ACM. |
| [73] | A. H. Ashouri, G. Mariani, G. Palermo, E. Park, J. Cavazos, and C. Silvano.
Cobayn: Compiler autotuning framework using bayesian networks. ACM Transactions on Architecture and Code Optimization (TACO), 13(2):21, 2016. |
| [74] | F. Pedregosa, G. Varoquaux, A. Gramfort, V. Michel, B. Thirion, O. Grisel,
M. Blondel, P. Prettenhofer, R. Weiss, V. Dubourg, J. Vanderplas, A. Passos,
D. Cournapeau, M. Brucher, M. Perrot, and E. Duchesnay.
Scikit-learn: Machine learning in Python. Journal of Machine Learning Research, 12:2825--2830, 2011. |
| [75] | G. Fursin, M. O'Boyle, O. Temam, and G. Watts.
Fast and accurate method for determining a lower bound on execution time. Concurrency: Practice and Experience, 16(2-3):271--292, 2004. |
| [76] | K. Asanovic, R. Bodik, B. C. Catanzaro, J. J. Gebis, P. Husbands, K. Keutzer,
D. A. Patterson, W. L. Plishker, J. Shalf, S. W. Williams, and K. A. Yelick.
The landscape of parallel computing research: a view from Berkeley. Technical Report UCB/EECS-2006-183, Electrical Engineering and Computer Sciences, University of California at Berkeley, Dec. 2006. |
| [77] | M. Hall, D. Padua, and K. Pingali.
Compiler research: The next 50 years. Commun. ACM, 52(2):60--67, Feb. 2009. |
| [78] | J. W. Duran and S. Ntafos.
A report on random testing. In Proceedings of the 5th International Conference on Software Engineering, ICSE '81, pages 179--183, Piscataway, NJ, USA, 1981. IEEE Press. |
| [79] | A. Takanen, J. DeMott, and C. Miller.
Fuzzing for Software Security Testing and Quality Assurance. Artech House, Inc., Norwood, MA, USA, 1 edition, 2008. |
| [80] | X. Yang, Y. Chen, E. Eide, and J. Regehr.
Finding and understanding bugs in c compilers. In Proceedings of the 32Nd ACM SIGPLAN Conference on Programming Language Design and Implementation, PLDI '11, pages 283--294, New York, NY, USA, 2011. ACM. |
| [81] | Microsoft security risk detection.
Link, 2016. |
| [82] | Continuous fuzzing of open source software.
Link, 2016. |
| [83] | C. Lidbury, A. Lascu, N. Chong, and A. F. Donaldson.
Many-core compiler fuzzing. In Proceedings of the 36th ACM SIGPLAN Conference on Programming Language Design and Implementation, PLDI '15, pages 65--76, New York, NY, USA, 2015. ACM. |
| [84] | A. Lascu and A. F. Donaldson.
Integrating a large-scale testing campaign in the CK framework. CoRR, abs/1511.02725, 2015. |
| [85] | Ck workflow for opencl crowd-fuzzing.
Link, 2015. |
| [86] | C. M. Bishop.
Pattern Recognition and Machine Learning (Information Science and Statistics). Springer, 1st ed. 2006. corr. 2nd printing 2011 edition, Oct. 2007. |
| [87] | C. Sammut and G. Webb.
Encyclopedia of Machine Learning and Data Mining. Springer reference. Springer Science + Business Media. |
| [88] | J. Cavazos, G. Fursin, F. Agakov, E. Bonilla, M. O'Boyle, and O. Temam.
Rapidly selecting good compiler optimizations using performance counters. In Proceedings of the International Symposium on Code Generation and Optimization (CGO), March 2007. |
| [89] | O. Russakovsky, J. Deng, H. Su, J. Krause, S. Satheesh, S. Ma, Z. Huang,
A. Karpathy, A. Khosla, M. S. Bernstein, A. C. Berg, and F. Li.
Imagenet large scale visual recognition challenge. CoRR, abs/1409.0575, 2014. |
| [90] | A. Monsifrot, F. Bodin, and R. Quiniou.
A machine learning approach to automatic production of compiler heuristics. In Proceedings of the International Conference on Artificial Intelligence: Methodology, Systems, Applications, LNCS 2443, pages 41--50, 2002. |
| [91] | G. Marin and J. Mellor-Crummey.
Cross-architecture performance predictions for scientific applications using parameterized models. SIGMETRICS Perform. Eval. Rev., 32(1):2--13, June 2004. |
| [92] | M. Stephenson and S. Amarasinghe.
Predicting unroll factors using supervised classification. In Proceedings of the International Symposium on Code Generation and Optimization (CGO). IEEE Computer Society, 2005. |
| [93] | M. Zhao, B. R. Childers, and M. L. Soffa.
A model-based framework: an approach for profit-driven optimization. In Third Annual IEEE/ACM Interational Conference on Code Generation and Optimization, pages 317--327, 2005. |
| [94] | F. Agakov, E. Bonilla, J.Cavazos, B.Franke, G. Fursin, M. O'Boyle, J. Thomson,
M. Toussaint, and C. Williams.
Using machine learning to focus iterative optimization. In Proceedings of the International Symposium on Code Generation and Optimization (CGO), 2006. |
| [95] | C. Dubach, T. M. Jones, E. V. Bonilla, G. Fursin, and M. F. O'Boyle.
Portable compiler optimization across embedded programs and microarchitectures using machine learning. In Proceedings of the IEEE/ACM International Symposium on Microarchitecture (MICRO), December 2009. |
| [96] | E. Park, J. Cavazos, L.-N. Pouchet, C. Bastoul, A. Cohen, and P. Sadayappan.
Predictive modeling in a polyhedral optimization space. International Journal of Parallel Programming, 41(5):704--750, 2013. |
| [97] | H. Leather, E. V. Bonilla, and M. F. P. O'Boyle.
Automatic feature generation for machine learning-based optimising compilation. TACO, 11(1):14:1--14:32, 2014. |
| [98] | C. Cummins, P. Petoumenos, Z. Wang, and H. Leather.
End-to-end deep learning of optimization heuristics. In 26th International Conference on Parallel Architectures and Compilation Techniques, PACT 2017, Portland, OR, USA, September 9-13, 2017, pages 219--232, 2017. |
| [99] | A. H. Ashouri, A. Bignoli, G. Palermo, C. Silvano, S. Kulkarni, and J. Cavazos.
Micomp: Mitigating the compiler phase-ordering problem using optimization sub-sequences and machine learning. ACM Trans. Archit. Code Optim., 14(3):29:1--29:28, Sept. 2017. |
| [100] | Artifact evaluation for computer systems research.
Link, 2014-cur. |
| [101] | Static Features available in MILEPOST GCC V2.1.
Link. |
| [102] | M. Abadi, A. Agarwal, P. Barham, E. Brevdo, Z. Chen, C. Citro, G. S. Corrado,
A. Davis, J. Dean, M. Devin, S. Ghemawat, I. J. Goodfellow, A. Harp,
G. Irving, M. Isard, Y. Jia, R. J\'ozefowicz, L. Kaiser, M. Kudlur,
J. Levenberg, D. Man\'e, R. Monga, S. Moore, D. G. Murray, C. Olah,
M. Schuster, J. Shlens, B. Steiner, I. Sutskever, K. Talwar, P. A. Tucker,
V. Vanhoucke, V. Vasudevan, F. B. Vi\'egas, O. Vinyals, P. Warden,
M. Wattenberg, M. Wicke, Y. Yu, and X. Zheng.
Tensorflow: Large-scale machine learning on heterogeneous distributed systems. CoRR, abs/1603.04467, 2016. |
| [103] | G. Fursin, J. Cavazos, M. O'Boyle, and O. Temam.
MiDataSets: Creating the conditions for a more realistic evaluation of iterative optimization. In Proceedings of the International Conference on High Performance Embedded Architectures & Compilers (HiPEAC 2007), January 2007. |
| [104] | G. Fursin.
Iterative Compilation and Performance Prediction for Numerical Applications. PhD thesis, University of Edinburgh, United Kingdom, 2004. |
| [105] | M. P\"uschel, J. M. F. Moura, B. Singer, J. Xiong, J. R. Johnson, D. A.
Padua, M. M. Veloso, and R. W. Johnson.
Spiral: A generator for platform-adapted libraries of signal processing alogorithms. IJHPCA, 18(1):21--45, 2004. |
| [106] | Y. Liu, E. Z. Zhang, and X. Shen.
A cross-input adaptive framework for gpu program optimizations. In 2009 IEEE International Symposium on Parallel Distributed Processing, pages 1--10, May 2009. |
| [107] | L. Luo, Y. Chen, C. Wu, S. Long, and G. Fursin.
Finding representative sets of optimizations for adaptive multiversioning applications. In 3rd Workshop on Statistical and Machine Learning Approaches Applied to Architectures and Compilation (SMART'09), colocated with HiPEAC'09 conference, January 2009. |
| [108] | Kaggle: platform for predictive modelling and analytics competitions.
Link, 2010. |
| [109] | Imagenet challenge (ILSVRC): Imagenet large scale visual recognition
challenge where software programs compete to correctly classify and detect
objects and scenes.
Link, 2010. |
| [110] | LPIRC: low-power image recognition challenge.
Link, 2015. |
| [111] | Public repositories with artifact and workflows in the Collective Knowledge
format.
Link. |
| [112] | Association for Computing Machinery (ACM).
Link. |
| [113] | P. Flick, C. Jain, T. Pan, and S. Aluru.
A parallel connectivity algorithm for de bruijn graphs in metagenomic applications. In Proceedings of the International Conference for High Performance Computing, Networking, Storage and Analysis, SC '15, pages 15:1--15:11, New York, NY, USA, 2015. ACM. |
| [114] | L. Nardi, B. Bodin, M. Z. Zia, J. Mawer, A. Nisbet, P. H. J. Kelly, A. J.
Davison, M. Luj\'an, M. F. P. O'Boyle, G. Riley, N. Topham, and S. Furber.
Introducing SLAMBench, a performance and accuracy benchmarking methodology for SLAM. In IEEE Intl. Conf. on Robotics and Automation (ICRA), May 2015. arXiv:1410.2167. |
| [115] | Collective Knowledge workflows for SLAMBench.
Link. |
| [116] | G. Fursin, A. Lokhmotov, and E. Upton.
Collective knowledge repository with reproducible experimental results from collaborative program autotuning on raspberry pi (program reactions to most efficient compiler optimizations). https://doi.org/10.6084/m9.figshare.5789007.v2, Jan 2018. |